Non ci sono prodotti a carrello.
Di Jens Schubert, Responsabile Marketing di Prodotto, Sensori magnetici, TDK-Micronas GmbH
Le funzioni fondamentali di un’auto sono circolare, svoltare e fermarsi in sicurezza. Una delle principali sfide tecnologiche per la guida autonoma consiste nel rilevare con precisione gli angoli di sterzata durante la svolta. I sensori convenzionali sono sensibili alle interferenze del campo magnetico presenti nei veicoli elettrici (EV), causate principalmente dai sistemi di elettrificazione. Questo articolo presenta un sensore a effetto Hall 3D di posizione che è immune a questo tipo di interferenza.
Sviluppo del servosterzo elettrico
Il sistema di sterzo di un’auto è un meccanismo che cambia la direzione delle ruote in base all’angolo di rotazione del volante. I sistemi di servosterzo assistono il conducente consentendo di ruotare i pneumatici con un leggero tocco sul volante. In passato, questi sistemi di servosterzo erano azionati idraulicamente, ma ora sono stati sostituiti da sistemi di servosterzo elettrico (EPS), che eliminano la necessità di una pompa idraulica, di tubi flessibili e di una cinghia di trasmissione per il motore a combustione interna (ICE). Essi offrono inoltre vantaggi di costi e minori consumi di carburante.
Un tipico sistema EPS utilizza motori elettrici, sensori e un controllore elettronico per fornire l’assistenza allo sterzo. Il motore aziona un ingranaggio collegato al piantone dello sterzo o alla cremagliera e i sensori misurano la coppia dello sterzo (sforzo di sterzata), la velocità di rotazione e la posizione angolare del volante. Il modulo di controllo elettronico interpreta questi valori in ingresso di coppia, velocità e posizione, insieme alla velocità del veicolo e ad altri ingressi di controllo del telaio, per ruotare i pneumatici di conseguenza.
Essendo possibile controllare i sistemi EPS elettronicamente, è possibile sterzare i veicoli senza l’intervento del conducente e tali soluzioni sono già utilizzate per i sistemi di assistenza al parcheggio dotati di sterzo automatico e di controllo elettronico della stabilità (ESC). Inoltre, i sistemi EPS supportano la migrazione dalle motorizzazioni a combustione interna verso i veicoli a batteria. Tuttavia, i sensori dell’angolo di sterzata utilizzati all’interno di questi sistemi EPS devono essere estremamente precisi per eseguire le funzioni di guida autonoma in modo efficace e sicuro.
Gli ultimi progressi sui sensori di sterzo
I sensori a effetto Hall sono generalmente utilizzati per il rilevamento dell’angolo di sterzata attraverso la misura delle forze o delle variazioni dei campi magnetici. Tuttavia, essendo diventati i veicoli più informatizzati ed elettrificati, i campi magnetici parassiti generati dai motori elettrici o dalle linee elettriche nei veicoli ibridi o elettrici interferiscono con il funzionamento del sensore. La riduzione di questa interferenza è diventata quindi una preoccupazione crescente.
TDK ha risposto a questa sfida introducendo il sensore HAL 39xy, il quale esegue le funzioni di compensazione dei campi parassiti. Il cuore del sensore è la tecnologia a celle pixel HAL 3D brevettata di TDK che aiuta a misurare i campi magnetici con precisione, pur garantendo l’immunità ai campi parassiti.
Il chip sensore compatto 4 in 1 offre modalità di misura per due posizioni di rotazione lineari fino a 180 e 360 gradi e misure 3D del campo magnetico sugli assi x, y e z. Il sensore utilizza una diversa combinazione della serie di piastre Hall all’interno del chip per ottimizzare le prestazioni in ciascuna modalità. Inoltre, integrando tutte e quattro le modalità in un unico dispositivo, il sensore offre un chiaro vantaggio ai progettisti in quanto essi devono qualificare un solo componente anziché quattro.
Il componente a basso consumo supporta vari standard di interfaccia digitale per le reti a bordo del veicolo, tra cui SENT/PSI5 e Short PWM Code (SPC). Quest’ultimo costituisce un’evoluzione del protocollo SENT secondo lo standard SAE J2716. Esso consente la trasmissione dei dati in base a un impulso di attivazione inviato da una unità ECU esterna e supporta connessioni punto-punto e una modalità bus su cavo singolo con un massimo di quattro sensori.
Il sensore HAL 39xy è un componente SEOOC (Safety Element out of Context) predisposto per il livello ASIL B, sviluppato secondo lo standard ISO 26262 a supporto di applicazioni per la sicurezza funzionale. Il sensore è già stato adottato in sistemi di rilevamento dell’angolo di sterzata per i veicoli autonomi.
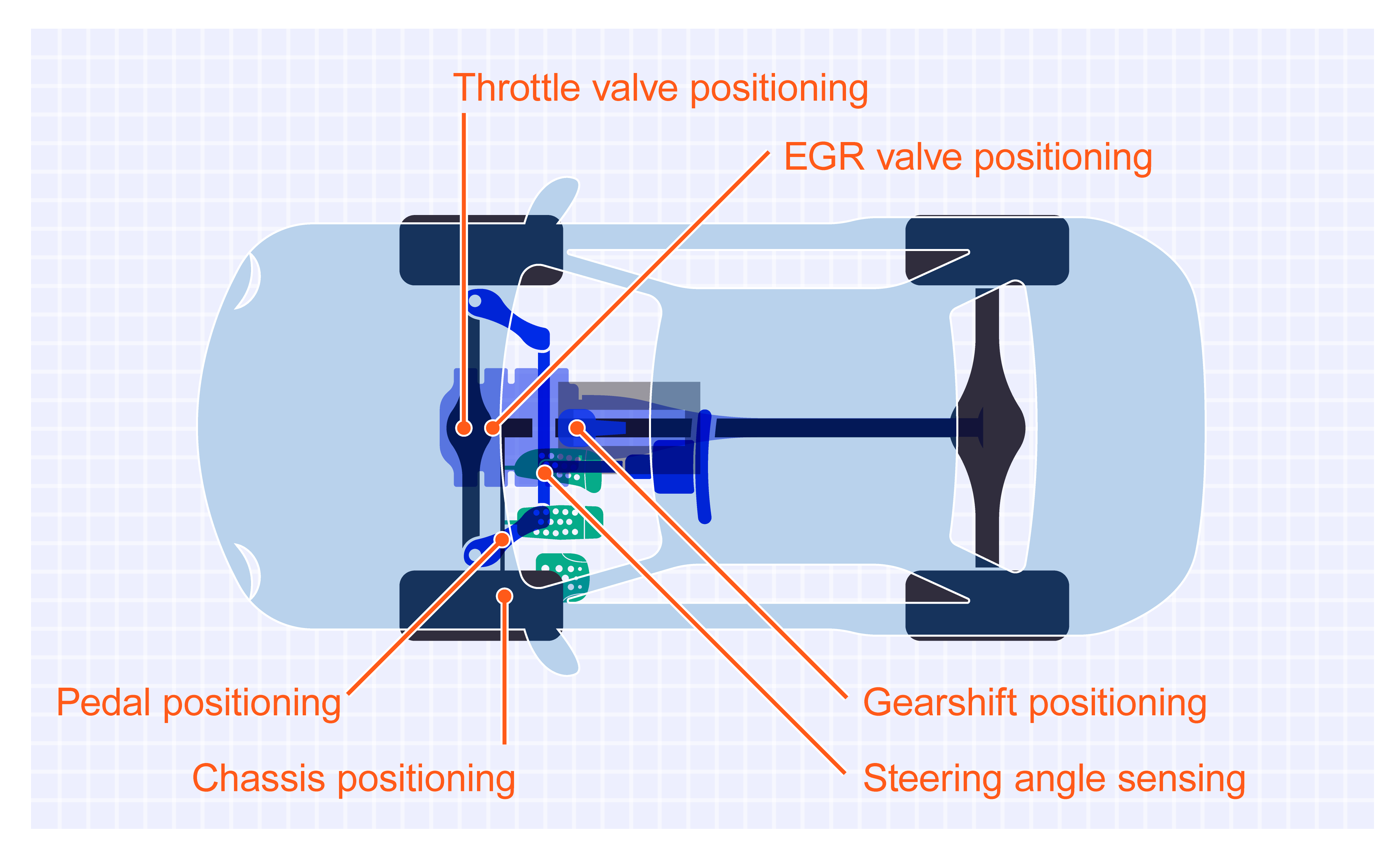
Figura 1: Le applicazioni del sensore HAL 39xy includono il rilevamento della posizione in vari punti del veicolo, come pedali, valvole e marcia, oltre all’angolo di sterzata.
Ulteriori applicazioni dei sensori
Oltre a ciò, sono attualmente in fase di sviluppo soluzioni come il rilevamento dell’angolo di sterzata per l’uso pratico nei sistemi steer-by-wire e si adattano perfettamente alla guida autonoma avanzata. Il sistema steer-by-wire rimuove il collegamento meccanico tra il volante controllato dal conducente e la rotazione dei pneumatici, affidandosi invece ai segnali elettrici per effettuare la sterzata. Inoltre, il sensore HAL 39xy può operare in ulteriori sistemi by-wire, che vanno dal brake-by-wire al shift-by-wire (cambio marcia).
I sensori 3D sono ideali per una vasta gamma di altre applicazioni, che includono tutti i tipi di valvole e attuatori, i selettori e le leve del cambio, il rilevamento della posizione del pedale, il rilevamento della posizione nei sistemi di trasmissione o rilevamento della posizione del telaio.
Per ulteriori informazioni sul sensore HAL 39xy, visitate il TDK Product Centre.

Jens Schubert