Non ci sono prodotti a carrello.
Autore: Matthias Thoma
I robot semplificano molti aspetti delle nostre vite, dalle procedure chirurgiche fino al sollevamento di migliaia di chili negli impianti produttivi. Mentre l’impatto dei robot nel nostro mondo moderno può essere ovvio, vi siete mai chiesti in che modo i sistemi robotizzati riescono a realizzare questi movimenti sorprendentemente precisi, veloci e potenti? Se la risposta che vi siete dati sono i motori elettrici, avete ragione.
Spesso un robot riproduce le azioni che altrimenti sarebbero eseguite da un essere umano: per questo motivo, le sue capacità devono comprendere un qualche tipo di spostamento o rotazione per regolare la posizione e l’orientamento, ossia movimenti che si ottengono tipicamente con dei motori elettrici.
Mentre i casi d’uso tradizionali puntano sugli azionamenti meccanici, ad esempio manovre eseguite da un braccio o la rotazione ciclica di un nastro trasportatore, i casi d’uso moderni sono più semplici, come la rotazione di una telecamera o di un sensore LIDAR per la guida di un braccio meccanico. Scoprire che semplici ventole e pompe sono applicazioni fondamentali per i motori elettrici ed effettivamente molto utili per funzioni di raffreddamento e idrauliche potrebbe essere sorprendente.
Video: Scoprite come TI migliora la robotica con l’innovazione nei semiconduttori
Ad esempio, un motore brushless in CC (BLDC, come mostrato in Figura 1) nell’articolazione di un braccio robotizzato è tendenzialmente dotato di un rotore che ruota e di uno statore che rimane fisso. L’applicazione di segnali elettrici per alimentare gli avvolgimenti della bobina sullo statore produce campi magnetici che a loro volta creano forze magnetiche che mettono in movimento il rotore, facendo quindi ruotare l’articolazione all’interno del braccio robotizzato. Utilizzando questi segnali elettrici nel modo corretto, il braccio robotizzato non si limita a muoversi, ma può farlo con velocità, precisione di posizionamento e coppia specifiche.
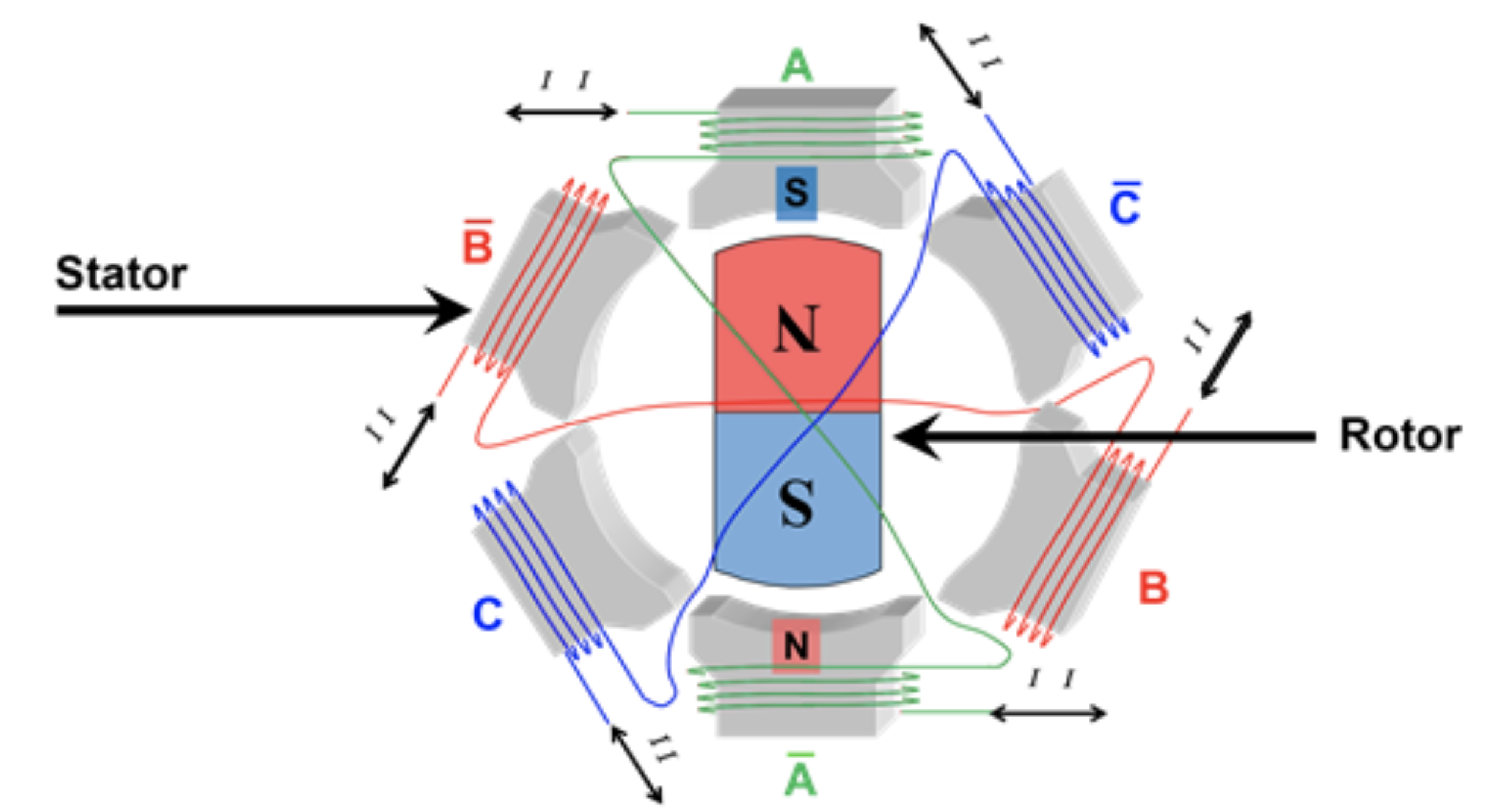
Figura 1: Schema della sezione trasversale della struttura di un motore elettrico BLDC
I motori elettrici sono alla base della robotica di nuova generazione
Oltre all’esecuzione di compiti di movimento precisi e potenti, gli sviluppi nel campo dei semiconduttori per il controllo di motori elettrici, come i microcontroller (MCU) e i driver motore integrati, stanno migliorando il modo in cui i robot si muovono. Diamo un’occhiata a quattro problematiche specifiche nel conseguimento di questo obiettivo.
Problematica n. 1: Aumento dei requisiti di sicurezza per consentire la collaborazione uomo-robot
Gli aspetti di sicurezza tradizionali richiedono una rigida separazione tra gli esseri umani e la robotica, ottenuta tipicamente posizionando i robot all’interno di gabbie. Poiché un ulteriore sviluppo dell’automazione richiede collaborazione e interazione più strette, i robot collaborativi consentono di migliorare la produttività, ma necessitano anche di motori che offrano funzionalità come arresto sicuro, velocità sicura, coppia e controllo del movimento.
Dispositivi come la MCU C2000 a 32 bit TMS320F28P650DK svolgono un ruolo fondamentale per rispettare i requisiti di sicurezza. Questi dispositivi sono in grado di integrare le periferiche di sicurezza per la diagnostica in modo da semplificare i progetti conformi alla ISO 10218 dell’Organizzazione Internazionale per la Normazione. All’estremità analogica dello spettro, i driver del gate smart come il DRV8353F possono aiutare gli ingegneri a raggiungere i propri obiettivi di sicurezza con una relazione tecnica approvata dal TÜV SÜD. Questo documento a supporto guida gli ingegneri attraverso le fasi di progetto necessarie per implementare la funzione di STO (Safe Torque Off) ai sensi della norma IEC 61800-5-2. La disponibilità di determinati componenti, che si tratti di una MCU o di un driver del gate, permette di agevolare il processo di progettazione per ottenere un sistema a motore elettrico con sicurezza funzionale.
Problematica n. 2: Ridurre il peso, il cablaggio e i costi per mezzo di un’architettura a motore elettrico decentralizzata
L’elettronica dei motori elettrici sta vivendo una transizione dai quadri di comando verso l’integrazione diretta nelle articolazioni dei robot, contribuendo quindi a ridurre il peso, il cablaggio e i costi di sistema. Questa tendenza sta spingendo i fabbricanti di componenti a sviluppare soluzioni che rendono possibile una maggiore integrazione di caratteristiche in package di circuiti integrati di dimensioni minori. I vincoli di spazio, inoltre, richiedono una maggiore densità di potenza e maggiore efficienza energetica.
I transistor a effetto di campo al nitruro di gallio, come l’LMG3422R050, dispongono di driver del gate integrati in grado di spingere l’efficienza dello stadio di potenza oltre il 99%, permettendo quindi di ridurre o eliminare la necessità di un dissipatore di calore sui motori elettrici integrati. I sistemi che utilizzano una MCU come la TMS320F28065 sono in grado di produrre segnali a modulazione di larghezza di impulso con una risoluzione nell’ordine dei picosecondi, con periferiche di comunicazione in tempo reale e interfacce per encoder assoluto. Queste caratteristiche permettono di ridurre il cablaggio da più di 10 fili per motore elettrico a un bus a due fili per un intero braccio robotizzato. Oltre a ottimizzare la densità di potenza e le capacità di elaborazione, è possibile realizzare la connettività via cavo nel sistema mediante l’aggiunta di capacità Single-Pair Ethernet per mezzo di un transceiver Ethernet a livello fisico, come il DP83TG721.
Problematica n. 3: Maggiore precisione e accuratezza per l’automazione di attività di movimento precise
La miniaturizzazione del prodotto ha effetto sulla scelta del motore (servomotore, motore passo-passo, BLDC) per molte applicazioni ed esiste una complessità correlata al controllo motore e al feedback di posizione per ottenere un movimento preciso nell’interazione con questi prodotti di minori dimensioni. Le innovazioni nel campo dei semiconduttori permettono di ottenere la maggiore precisione necessaria per il supporto della miniaturizzazione. Ad esempio, i sensori di corrente come l’AMC3306 presentano un offset di ±50 µV e sono dotati inoltre di un alimentatore integrato. L’integrazione di queste caratteristiche in un unico package consente una maggiore accuratezza nel loop di controllo e riduce le dimensioni complessive del circuito stampato.
Problematica n. 4: Ottimizzazione dell’efficienza energetica per la realizzazione di applicazioni mobili a batteria
I robot non si limitano a rimanere fissi in un posto: le applicazioni nel campo della robotica si stanno facendo mobili e vengono implementate per consentire la consegna autonoma di pacchi e per esplorare un terreno di sicurezza. Gli attuali e futuri semiconduttori per applicazioni di rilevamento, elaborazione e controllo in tempo reale devono trovare un equilibrio tra prestazioni elevate ed efficienza di alimentazione per garantire una ragionevole durata della batteria e autonomia di marcia.
Ottenere l’efficienza energetica non deve essere complicato o richiedere approcci complessi alla progettazione con numerosi componenti discreti. Ad esempio, i controller a motore singolo come l’MCT8316A possono contribuire ad azionare piccoli motori elettrici per pompe e ventole riducendo il numero di componenti che consumano energia all’interno del robot. L’MCT8316A ad elevata integrazione è dotato di sei transistor metallo-ossido-semiconduttore a effetto di campo che vanno a formare uno stadio di potenza half-bridge per l’erogazione della corrente del motore, nonché di un core digitale per un semplice controllo motore trapezoidale.
Qual è il prossimo passo nel controllo motore?
Sicuramente i robot di domani ci sorprenderanno per la facilità con cui svolgeranno attività che oggi appaiono impossibili, operando in grandi numeri nei più profondi abissi dell’oceano o negli spazi conosciuti del cosmo. Nuovi progetti potranno integrare quantità sempre maggiori di sensori più avanzati, come è già avvenuto con l’adozione del LIDAR e delle tecnologie a ultrasuoni. Anche il nostro metodo di comunicare con i robot potrebbe cambiare, passando dai robot collegati via cavo del passato a soluzioni moderne, maggiormente rivolte al software. I miglioramenti in termini di accessibilità potrebbero permettere di controllare i robot con maggiore affidabilità mediante controllo vocale, con espressioni visive o addirittura soltanto con il pensiero. In definitiva, mentre le tecnologie e le applicazioni nel campo della robotica sono in continua evoluzione, lo stesso deve avvenire per i motori che le mettono in movimento.