Non ci sono prodotti a carrello.
Il programma europeo di valutazione delle nuove automobili (NCAP, New Car Assessment Program) ha recentemente aggiornato i propri standard per i radar al fine di migliorare le funzionalità di assistenza alla guida nelle nuove auto.
Gli standard NCAP variano da un’area mondiale all’altra; la versione statunitense dell’NCAP è gestita dalla NHTSA, ossia la National Highway and Traffic Safety Administration, mentre la Global NCAP è un’organizzazione centralizzata. Tuttavia, tutte le organizzazioni condividono un unico obiettivo: stabilire standard che rendano le auto e la guida più sicure. Le organizzazioni forniscono valutazioni assegnando da 0 a 5 stelle per aiutare i consumatori a prendere decisioni informate sull’acquisto di nuove auto.
In molti casi, Euro NCAP è stato il primo ente a stabilire standard che alzano l’asticella nell’industria automobilistica in tutto il mondo. Il regolamento più recente, il n.79, specifica la distanza minima e la velocità di esercizio minima per radar di rilevamento del punto cieco e per l’assistenza al cambio di corsia.
Per i radar, il paragrafo «Distanza minima e velocità di esercizio minima» (paragrafo 5.6.4.8) permette di individuare la velocità di esercizio minima Vsmin, fino alla quale la funzione sterzante a comando automatico ACSF di Categoria C ha il permesso di effettuare una manovra di cambio corsia, con una distanza minima Sposteriore che può essere supportata dal radar.
In altre parole, permette di identificare fino a che punto il sensore radar di rilevamento del punto cieco deve funzionare a una velocità di esercizio minima di 20 km/h per un sistema ACSF di Categoria C che esegue una manovra di cambio corsia LCM.
Cambio corsia con maggiore sicurezza
Una manovra di cambio corsia in sicurezza avviene quando il veicolo in avvicinamento ha tempo sufficiente per reagire (rallentare) in modo da garantire che vi sia in ogni momento una distanza di sicurezza durante la marcia tra i due veicoli. Nello specifico, il regolamento R79 (nel paragrafo 5.6.4.7) definisce critica una potenziale manovra di cambio corsia da parte di un ego vehicle se un veicolo in avvicinamento nella corsia obiettivo dovesse decelerare di oltre 3 m/s², 0,4 secondi dopo l’inizio della manovra di cambio corsia, in modo da garantire che la distanza tra i due veicoli non sia mai inferiore a quella percorsa dall’ego vehicle in 1 secondo.
Conoscendo la distanza e la velocità del veicolo in avvicinamento e la velocità dell’ego vehicle è possibile calcolare la distanza critica Scritica (paragrafo 5.6.4.7.1) fra i due veicoli all’inizio del cambio corsia. La manovra di cambio corsia non è consentita se all’inizio della manovra la distanza tra i due veicoli è inferiore a Scritica. La Figura 1 in basso mostra la Scritica in funzione della velocità dell’ego vehicle. Si noti che per una velocità dell’ego vehicle di 20 km/h, la distanza critica è vicina a 180 m.
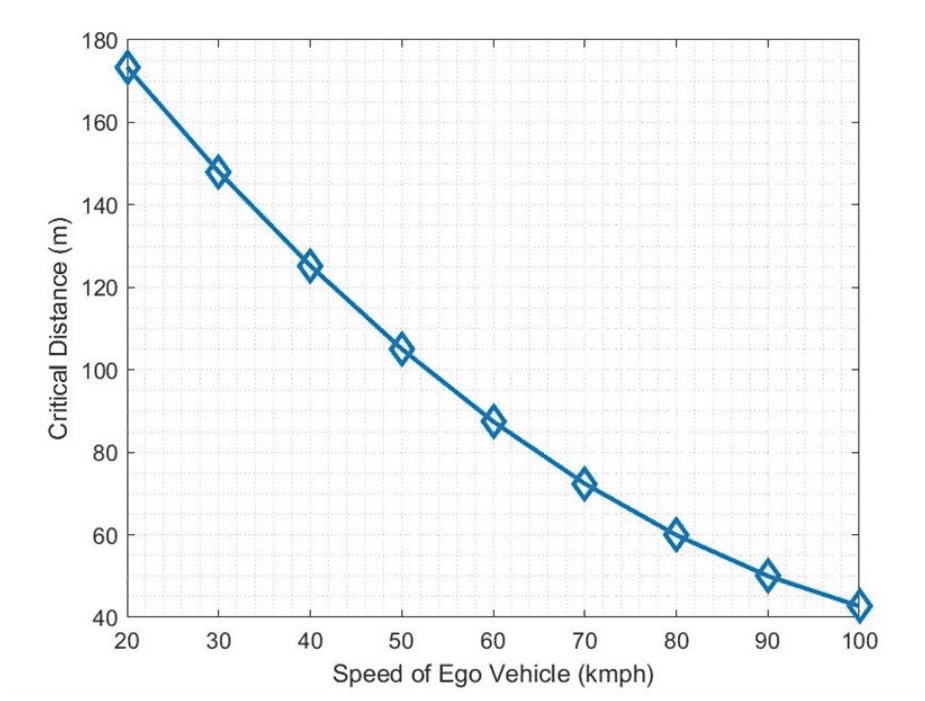
Figura 1: Grafico della distanza e della velocità necessarie per effettuare un cambio corsia critico in sicurezza.
Pertanto, il rilevamento di un veicolo in avvicinamento e la stima della sua distanza sono fondamentali per un efficace cambio corsia. Come descritto nel Paragrafo 5.6.4.8 del regolamento, ogni costruttore deve dichiarare la distanza minima (Sposteriore) a cui il veicolo è in grado di rilevare in modo affidabile l’avvicinamento da dietro nella corsia adiacente (il regolamento prevede l’utilizzo di un veicolo a due ruote per testare la Sposteriore). In base alla Sposteriore dichiarata, il regolamento definisce quindi una velocità di esercizio minima (Vsmin) calcolata alla velocità minima alla quale l’ego vehicle è in grado di eseguire un cambio corsia, con un veicolo in avvicinamento ad una distanza Sposteriore e una velocità di 130 km/h, come mostrato in Figura 2.
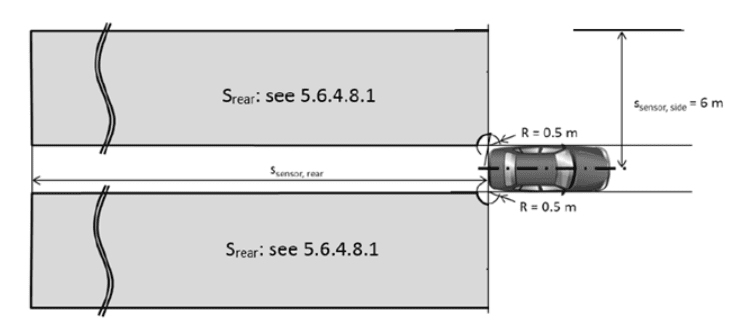
Figura 2: Rappresentazione delle normative NCAP per velocità e distanza. (Fonte dell’immagine: Regolamento UN n.79)
Se l’ego vehicle non rileva alcun veicolo in avvicinamento nella corsia adiacente, la normativa ipotizza, nel caso peggiore, che vi sia un veicolo in avvicinamento non rilevato a una distanza Sposteriore con una velocità di 130 km/h. In questo caso, il cambio corsia non è consentito a velocità inferiori a Vsmin. Tuttavia, se l’ego vehicle rileva un bersaglio in avvicinamento a una distanza inferiore a Sposteriore, è possibile effettuare un cambio corsia a una velocità inferiore a Vsmin, a condizione che la situazione non sia considerata critica (ossia la distanza tra il veicolo in avvicinamento e l’ego vehicle è maggiore di Scritica, come definita in 5.6.4.7.1).
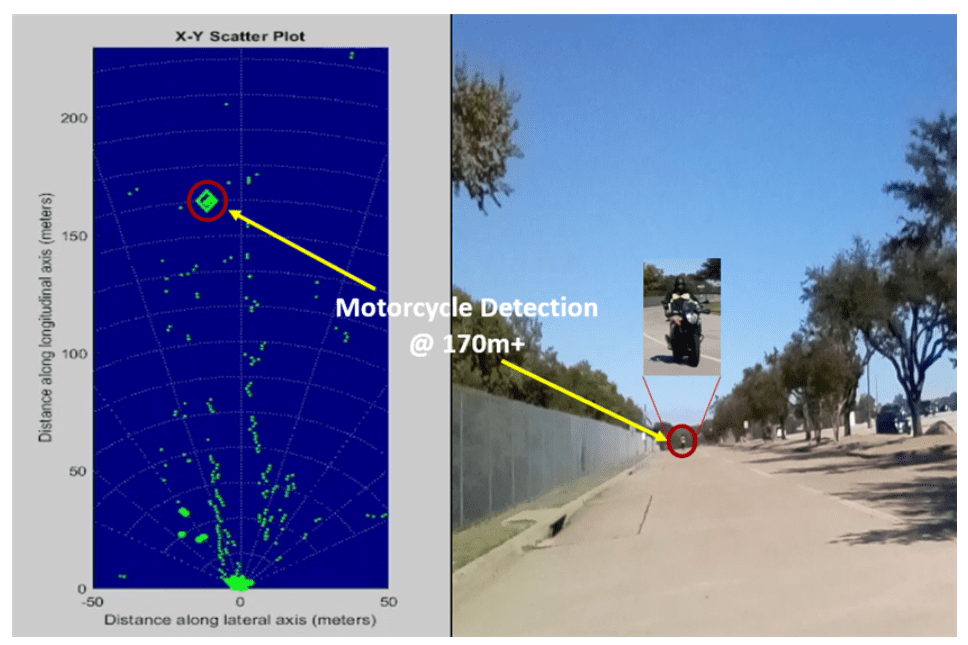
Figura 3: Rilevamento di una moto a più di 170 m
L’AWR2944 di TI è in assoluto il primo sensore radar angolare a chip singolo che permette alle case automobilistiche di soddisfare questi requisiti di sicurezza NCAP. Il sensore fornisce prestazioni ineguagliate di radar angolare e le migliori prestazioni in radiofrequenza nella sua categoria grazie a un 4º trasmettitore che permette di aumentare del 33% la risoluzione angolare rispetto ai tradizionali dispositivi a 3 trasmettitori. Questi sono i risultati dei test con alcune condizioni per caso d’uso:

Figura 4: Rilevamento di un’auto a più di 200 m
Conformità ai requisiti NCAP con i sensori radar mmWave per radar angolare di TI
Grazie ad un radar ad alta risoluzione con un maggiore raggio d’azione, le auto possono rilevare più velocemente i veicoli in avvicinamento, a maggiore distanza, per cambiare corsia e attraversare gli incroci in modo più sicuro. Il radar angolare di TI permette alle case automobilistiche di soddisfare i più recenti requisiti di sicurezza NCAP e può aumentare la sicurezza di guida in tutto il mondo.