Non ci sono prodotti a carrello.
Di Marshall Beck, Applications Engineer
Introduzione
Le moderne normative sulle emissioni rendono necessario realizzare automobili più efficienti. Sebbene le case automobilistiche possano ottenere veicoli più ecologici attraverso l’elettrificazione di più funzioni dell’auto, un approccio di questo tipo richiede di rivedere i sistemi a 12 V dell’automobile in modo da gestire maggiori richieste di potenza senza incidere sull’efficienza o sul costo del sistema.
Le case automobilistiche stanno quindi realizzando auto più ecologiche attraverso una piattaforma elettrica a doppia fonte energetica, come nei veicoli elettrici mild hybrid (MHEV). Un MHEV combina una batteria a 12 V (per la compatibilità con i sistemi attuali) con un pacco batterie agli ioni di litio da 48 V per alimentare carichi ad alta potenza, come il motorino di avviamento/generatore (vedere la Figura 1). Un motorino di avviamento/generatore (ISG, integrated starter generator) convenzionale integrato è in grado di erogare meno di 15 kW di potenza per via dell’inefficiente trasferimento di potenza fra la sua cinghia e la trasmissione dell’automobile. Le più recenti versioni di ISG consentono una maggiore efficienza, con architetture parallele (P2/P3/P4) in grado di erogare fino a 20 kW, andando a ridurre la produzione di biossido di carbonio per il 15% circa.[1]
L’aumento delle richieste di potenza da parte dei motorini di avviamento/generatori dei MHEV ha portato i progettisti a rivolgersi alle batterie a 48 V. I motorini di avviamento/generatori P2/P3/P4 possono erogare maggiore potenza per azionare i componenti ausiliari. Un motorino di avviamento/generatore azionato a 48 V consente una maggiore potenza di uscita con una ridotta erogazione di corrente. Una minore richiesta di corrente permette di utilizzare fili di spessore inferiore per i 4 km di cablaggio,[2] il che permette di ridurre sensibilmente il peso, migliorare l’efficienza della vettura e ridurre i costi del sistema.
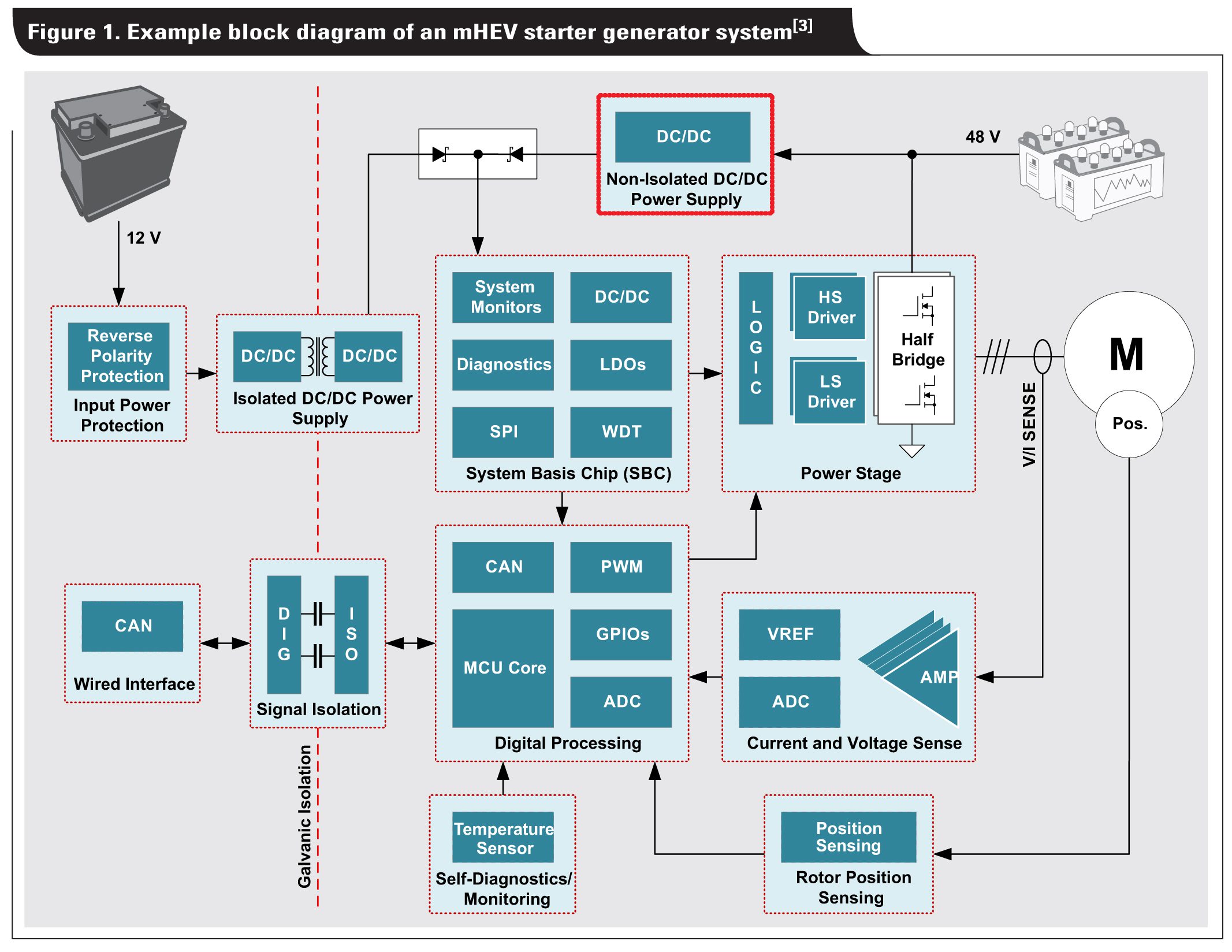
Figura 1. Schema a blocchi di esempio di un sistema per motorino di avviamento/generatore MHEV[3]
Inoltre, è importante considerare le prestazioni per le interferenze elettromagnetiche (EMI) del regolatore step-down, in quanto i sottosistemi a 48 V sono soggetti ai test di conformità CISPR 25 Classe 5 del Comité International Spécial des Perturbations Radioélectriques.
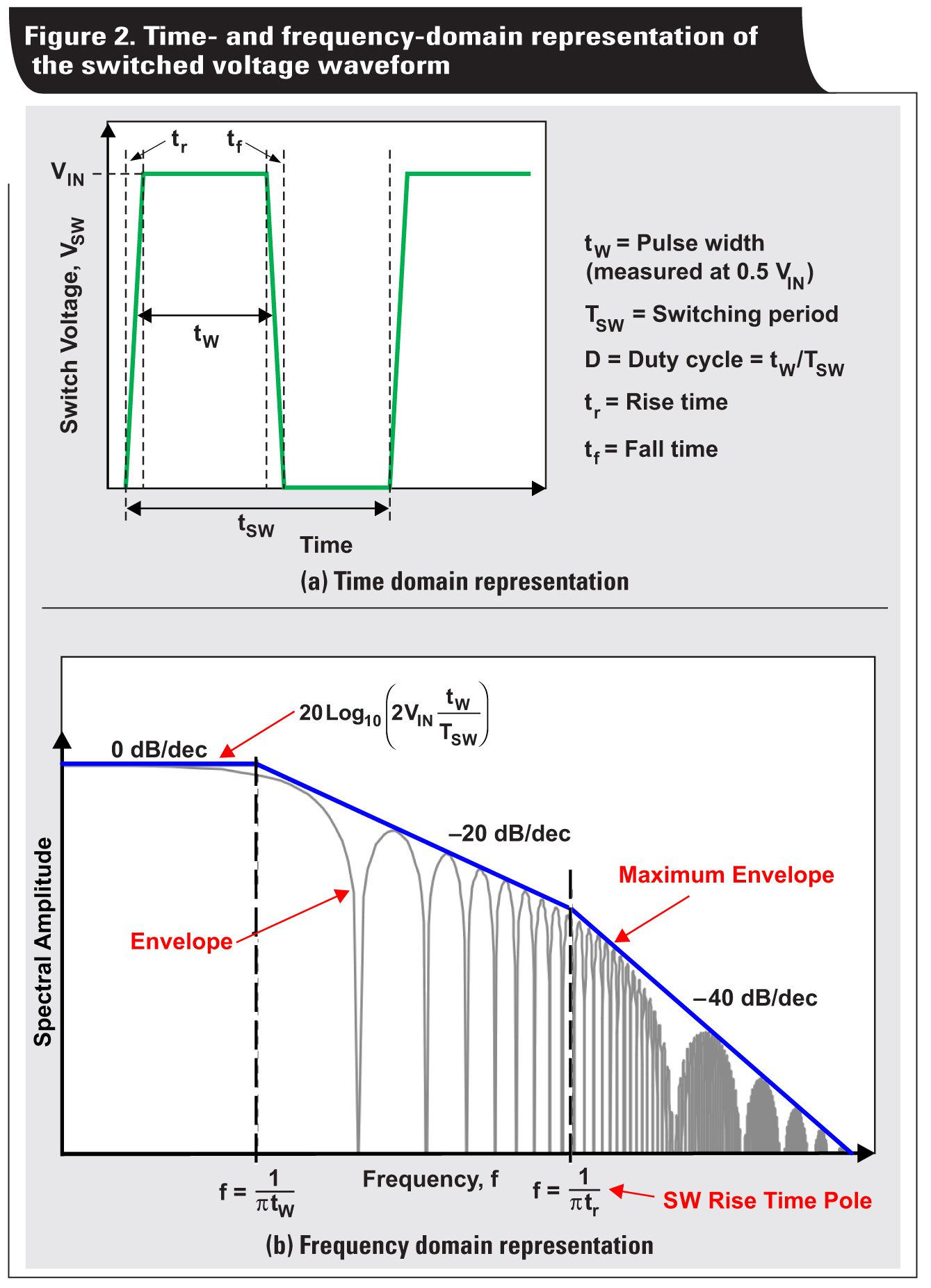
Figura 2. Rappresentazione nel dominio del tempo e della frequenza della forma d’onda della tensione commutata
Problemi di EMI con sistemi a doppia batteria da 12V e 48V
I principi generali della mitigazione EMI non cambiano fra i regolatori step-down a 12 V ed a 48 V. La corrente di ingresso discontinua del regolatore e la forma forma d’onda della tensione del nodo di commutazione generano delle EMI, mentre un convertitore step-down può causare problemi di conformità per la compatibilità elettromagnetica (EMC) con problemi di inadeguatezza del filtro di ingresso o del design del layout. Questo aspetto è una fortuna, perché la stessa capacità di potenza di uscita a 48 volte con una corrente di carico ridotta riduce le emissioni condotte (differenziali), la forma d’onda commutata, ossia la seconda fonte predominante di EMI, richiede la massima attenzione. La maggiore ampiezza delle forme d’onda commutate porta a maggiori EMI.
[boris]
Come mostrato in Figura 2a), la forma d’onda commutata del regolatore è una forma d’onda trapezoidale con una grandezza pari a quella della tensione di ingresso. Per semplificare, ipotizzando frequenze del fronte uguali, l’ampiezza dei coefficienti di Fourier di questa forma d’onda è in relazione diretta con la sua grandezza. Il limite superiore dell’inviluppo spettrale (in DC) da VIN = 12 V a VIN = 48 V corrisponderebbe a un aumento di 12 dB, come mostrato in Figura 2b.
L’aumento dell’ampiezza della forma d’onda della tensione del nodo di commutazione porta alla presenza di una maggiore energia a frequenze superiori, dove anche i limiti CISPR 25 Classe 5 diventano più severi. L’energia ad alta frequenza diventa un problema maggiore con frequenze del fronte più veloci sulla forma d’onda commutata. Frequenze del fronte più veloci contribuiscono a ridurre le perdite di commutazione all’interno di un progetto per regolatore, ma al costo di un aumento del rumore, idea spiegata dalla posizione del «polo del tempo di salita SW» nella Figura 2b. L’inviluppo spettrale della forma d’onda trapezoidale scivola di –40 dB/dec nella posizione di questo polo. Un polo del tempo di salita SW più alto o un tempo di salita più veloce porta a un maggiore contenuto di energia ad alta frequenza sulla forma d’onda commutata.
È necessario ricordare che il nodo di commutazione o emettere del rumore. Una vasta area di rami (compreso l’induttore) aumenta la generazione di rumore, in particolare nel caso con ingresso a 48 V. Questo aumento è evidente nello sweep EMI delle emissioni condotte da 30 MHz a 108 MHz del regolatore. La Figura 3 confronta le prestazioni EMI con gli ingressi a 24 V ed a 48 V.
La corrente di ripple dell’induttore dovrebbe essere idealmente compresa fra il 30% e il 40% della corrente di carico per garantire basse perdite del core e una bassa ondulazione di uscita. L’equazione 1 calcola l’ondulazione dell’induttore:

Un differenziale più alto tra la tensione di ingresso e uscita richiede un’induttanza maggiore, che comporta la necessità di un induttore con un package di maggiori dimensioni. Ad esempio, l’ondulazione dell’induttore dovrebbe essere limitata a 150 mA per un’alimentazione a polarizzazione da 500 mA. Pertanto, un convertitore a 400 kHz da 12 V a 5 V necessiterebbe di un induttore da 47 μH. Al confronto, una conversione da 48 V a 12 V richiederebbe un induttore da 150 μH. Per garantire un simile dimensionamento di potenza sarebbe necessario un induttore molto più grande, che genererebbe un rumore sensibilmente maggiore.
La conversione da 48 V a 12 V necessita di una frequenza di commutazione più bassa (banda sub-AM, come i 400 kHz) per rimanere al di sopra del requisito minimo di puntualità. Il requisito minimo di puntualità del regolatore è una specifica del circuito integrato (IC) che descrive tipicamente il tempo necessario affinché il regolatore rilevi adeguatamente la corrente dell’induttore. Inoltre, una frequenza di commutazione più bassa necessita anche di un filtro di uscita più grande. L’induttanza e le capacità relative aumentano quindi per garantire sia la stabilità sia prestazioni sufficienti. Il maggiore valore di induttanza porta ad un aumento delle dimensioni fisiche del filtro di uscita, causando quindi una maggiore generazione di rumore.
Il rumore del nodo di commutazione si accoppia in senso capacitivo sulle linee di ingresso del sistema di una batteria per auto a 12 V. Il sistema MHEV a doppia batteria richiede che la massa della fonte a 48 V (KL41) e della fonte a 12 V (KL31) restino separate[4]: il telaio viene collegato a KL31 e cattura questo rumore del nodo di commutazione, dotando eventualmente a ulteriori emissioni irradiate, note come rumore di modo comune. La generazione di questo rumore deve essere soppressa; in caso contrario, il sottosistema alimentato a 48 volte non sarà conforme a CISPR 25 Classe 5.
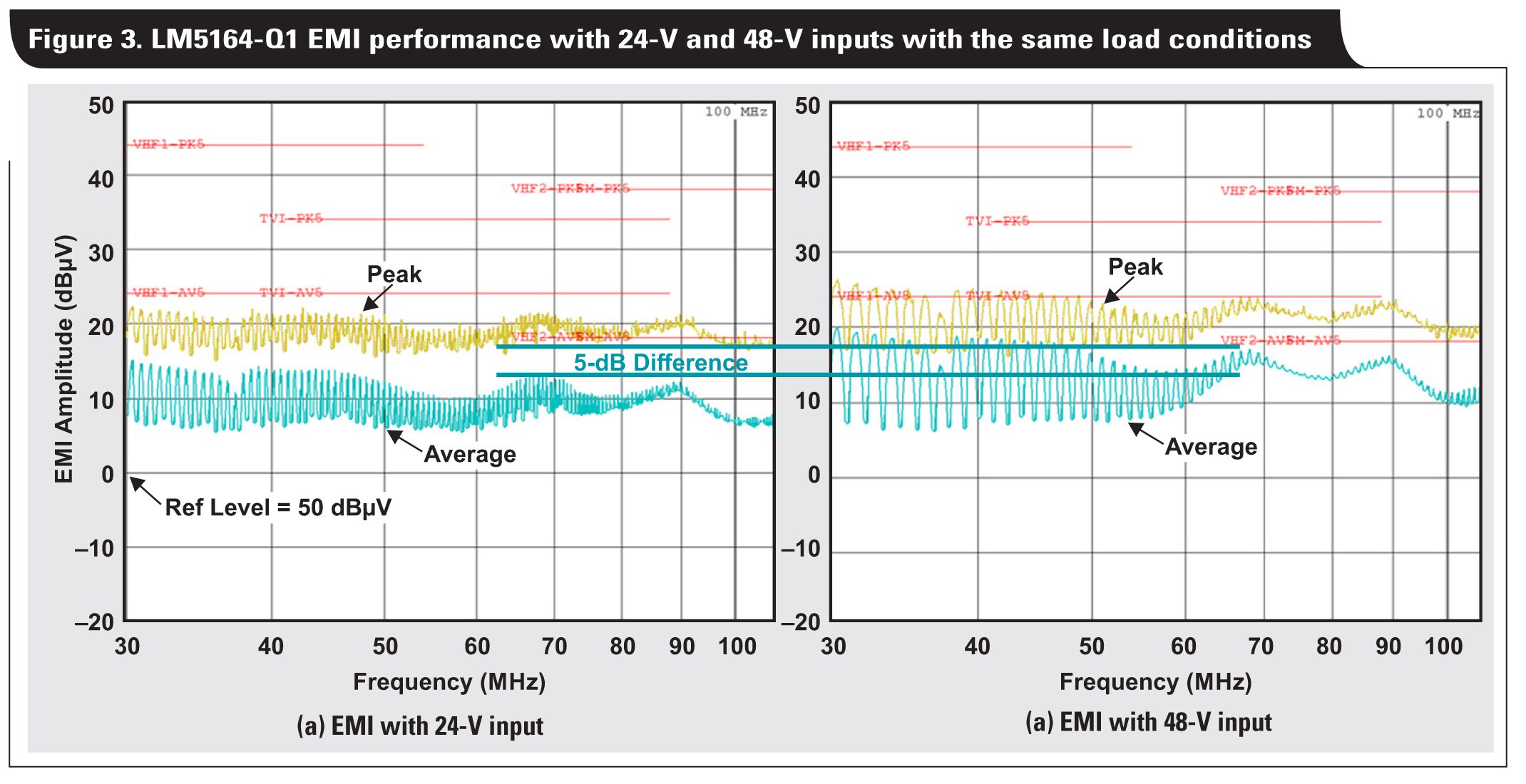
Figura 3. Prestazioni EMI di LM5164-Q1 con ingressi a 24 V e 48 V con le stesse condizioni di carico
Soppressione del rumore di modo comune del regolatore step-down a 48V
L’elevata frequenza del fronte sul nodo di commutazione crea del rumore al di sopra della fascia a 30 MHz, estendendosi nella banda FM e creando una sfida per i test di conformità. Le tecniche di mitigazione del rumore possono ridurre questo rumore e portare ad un progetto conforme a CISPR 25 Classe 5.
I regolatori di potenza automobilistici a basso rumore includono uno spettro espanso per la riduzione del rumore. La modulazione della frequenza di commutazione riduce l’energia di picco nello spettro di emissione. La modulazione triangolare a spettro espanso (TRSS) è uno dei modi per ridurre l’energia di picco.
La TRSS è ottimizzata per diffondere l’energia a frequenze inferiori. La frequenza di modulazione TRSS è prossima al filtro a larghezza di banda di risoluzione a 9 kHz (RBW, resolution-bandwidth) utilizzato per i test condotti in CISPR 25 Classe 5 tra 150 kHz e 30 MHz e consente una riduzione del picco in questa banda di frequenza CISPR 25 Classe 5. A bande di frequenza superiore, sfortunatamente, la TRSS non è efficace, ma in questi casi le tecniche a spettro espanso pseudo casuale (PRSS, pseudorandom spread-spectrum) compensano questa mancanza della TRSS. Poiché la maggior parte delle problematiche EMI si originano a frequenze superiori (ossia nella banda FM), la PRSS è in grado di modulare ad una frequenza più appropriata per i test CISPR 25 Classe 5, da 30 MHz a 108 MHz. È possibile raggiungere una frequenza di modulazione efficace più a banda larga e più adatta ad un filtro RBW ad alta frequenza (120 kHz) con la PRSS.
Lo spettro espanso doppio casuale (DRSS, dual-random spread-spectrum) è la più recente versione della modulazione a spettro espanso proposta da Texas Instruments. Poiché la DRSS implementa il dithering pseudo casuale ciclo per ciclo in aggiunta alla sua forma d’onda a bassa frequenza e a modulazione triangolare, implementa quindi le migliori caratteristiche sia della TRSS che della PRSS. Questa tecnica di modulazione attenua la larghezza di banda del filtro RBW utilizzata nelle misurazioni CISPR 25 Classe 5 a bassa e alta frequenza.
I regolatori di potenza a basso rumore implementano molte di queste tecniche a spettro espanso; in pratica, molti controller da 100 V (Figura 4) contengono spesso un pin SYNCIN per l’applicazione di una sorgente di clock esterna che può essere modulata con una delle tecniche a spettro espanso qui descritte, nonché un pin SYNCOUT aggiuntivo per bufferizzare la fonte di clock esterno. In definitiva, la sincronizzazione dei progetti a regolatore multiplo consente di evitare la formazione della frequenza di battimento causata da piccole differenze nelle frequenze di commutazione.
Inoltre, poiché le applicazioni dei sistemi avanzati di assistenza alla guida (ADAS) si evolvono e richiedono più potenza di elaborazione o sensori (o entrambi), i progetti dei sistemi possono richiedere ancora più potenza in uscita dal regolatore da 48 V a 12 V. I regolatori in parallelo con SYNCIN e SYNCOUT facilitano una maggiore capacità di potenza in uscita oltre alla cancellazione dell’ondulazione. Il pin SYNCOUT sfasato di 180 gradi nell’LM5146-Q1 permette un basso rumore grazie all’annullamento dell’ondulazione in ingresso. Questo consente di realizzare un progetto di alimentazione conforme, a corrente elevata e uscita multipla per la batteria da 48 V. Il versatile LM5146-Q1 offre un alimentatore modulare per il riutilizzo del progetto su piattaforme ADAS in evoluzione.
Le elevate frequenza del fronte della tensione di commutazione estendono il diagramma della densità spettrale di potenza fino alla banda FM. La conversione da 48 V a 12 V richiede un convertitore funzionante a una frequenza inferiore alla banda AM (400 kHz). La frequenza di commutazione «bassa», in tandem con il requisito di carico subampere sull’alimentazione di polarizzazione del motorino di avviamento/generatore, si traduce in un convertitore a bassa perdita. Il miglioramento dell’efficienza consente tempi di salita più lunghi per ridurre il rumore, che un progetto conforme potrebbe in effetti richiedere.
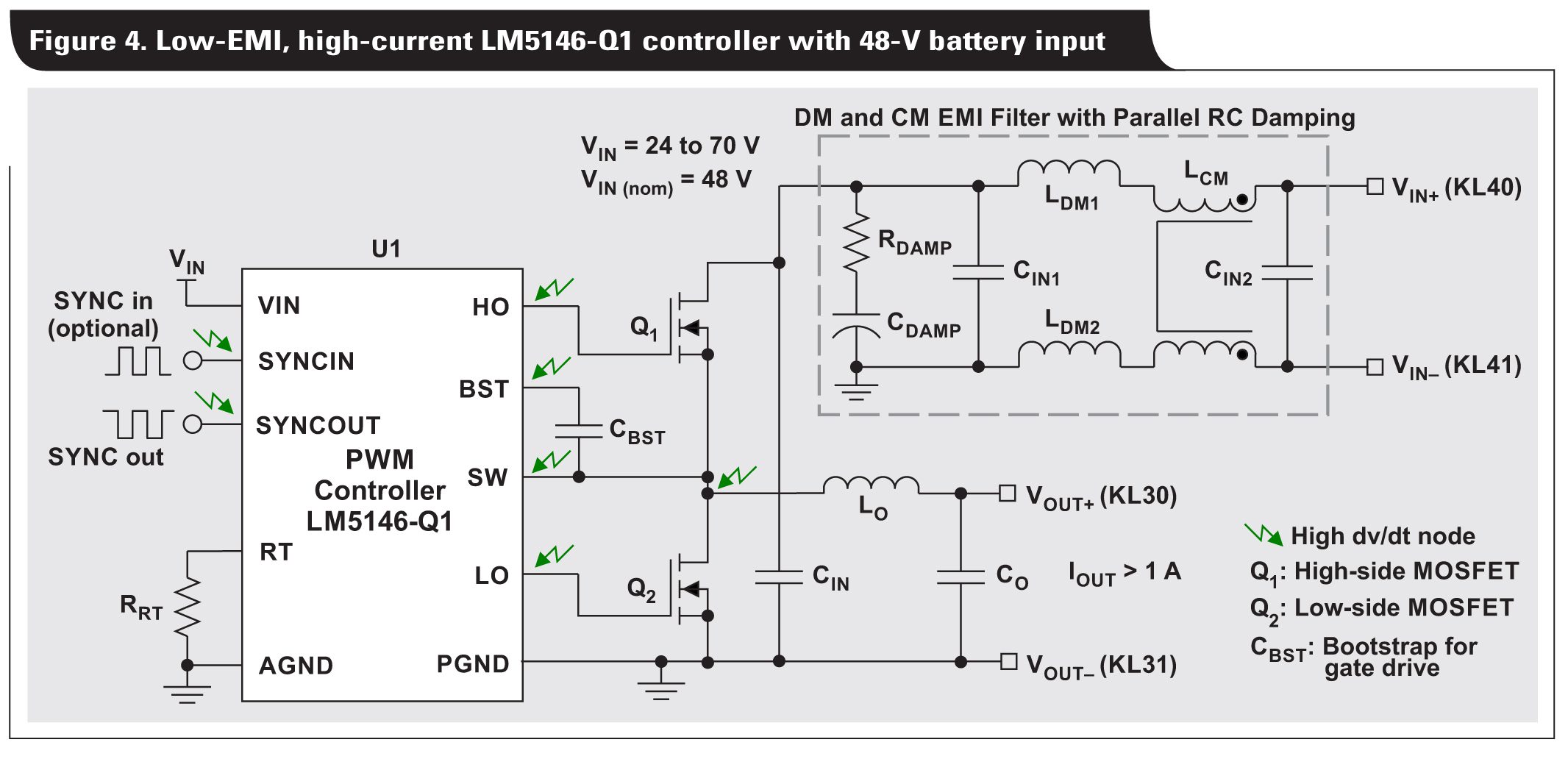
Figura 4. Controller LM5146-Q1 a basse EMI e corrente elevata con ingresso batteria da 48 V
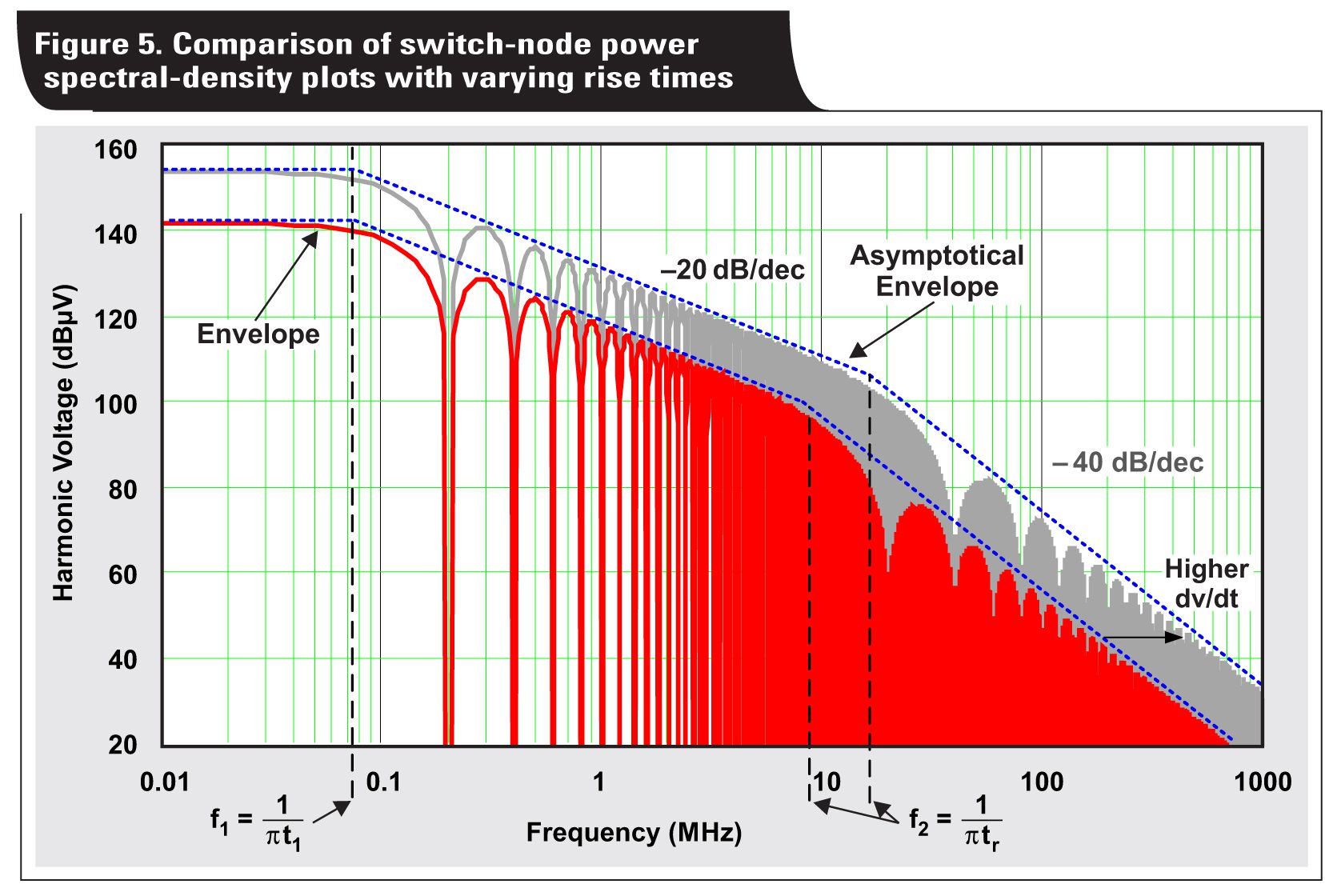
Figura 5. Confronto di diagrammi della densità spettrale di potenza del nodo di commutazione con tempi di salita variabili
Uno dei metodi per ridurre i tempi di salita comporta la creazione di un tempo di salita più lungo per la tensione di gate del MOSFET aggiungendo una resistenza in serie con il condensatore di avvio (CBST in Figura 4). L’accensione più lenta del MOSFET porta quindi ad un polo del tempo di salita SW a frequenza inferiore. La Figura 5 mostra una riduzione di 20 dB utilizzando questo metodo, con una forma d’onda della tensione del nodo di commutazione che ha un tempo di salita del 100% maggiore rispettto al valore predefinito.
Il numero di strumenti EMI implementati nei regolatori di potenza continua ad aumentare per soddisfare le crescenti richieste di funzionamento a frequenze più elevate, per raggiungere densità di potenza più elevate e per rispettare le più rigorose normative EMI. Sfortunatamente, tali requisiti richiedono spesso filtri EMC ulteriori in aggiunta alle tecniche di mitigazione EMI del circuito integrato.
Conclusione
Prima di scegliere un regolatore di potenza per un’applicazione a 48 V è importante valutare l’impatto di una tensione di ingresso più elevata sull’EMI. Inoltre è importante scegliere un regolatore di potenza con più funzioni di mitigazione EMI per ridurre il rumore aggiuntivo dalla tensione di ingresso più elevata. Anche con regolatori a basso rumore è consigliabile seguire le pratiche di layout per circuito stampato a basso rumore e adottare un approccio metodico quando si selezionano i componenti EMC. L’emulazione di esempi di schede tecniche e schede di valutazione sono alcuni validi passi iniziali nella progettazione di un convertitore di potenza a basso rumore.
Bibliografia
- Anuj Narain,«Evolution of 48V starter-generator systems», articolo tecnico sui forum di supporto TI E2E™, 23 settembre 2019.
- Jiri Panacek, «Bridging di 12 V e 48 V in sistemi automobilistici a doppia batteria», White Paper Texas Instruments (SLPY009), 2018.
- Inverter e controllo motore, circuiti integrati e progetti di riferimento di Texas Instruments.
- Timothy Hegarty, «Why use PSR-flyback isolated converters in dual-battery mHEV systems», Texas Instruments Analog Design Journal (SLYT791), 2Q 2020.
Articoli correlati
[/boris]