Non ci sono prodotti a carrello.
di Esteban Garcia, Current & Position Sensing (CSPS)
I robot aspirapolvere autonomi utilizzano oggi sensori per il rilevamento degli ostacoli; la tendenza è di integrare altre tecnologie di rilevamento aggiuntive per il rilevamento del tipo di pavimento e del dislivello. Il rilevamento a ultrasuoni può essere utilizzato in queste applicazioni grazie alla sua capacità di distinguere fra diversi tipi di materiale e la sua immunità al fumo e alla polvere, fornendo al tempo stesso una risposta affidabile.
Attualmente, sono necessari robot di pulizia separati per aspirare la polvere e lavare i pavimenti, raddoppiando il costo della soluzione. Per integrare queste funzioni in un unico sistema, è importante che il robot di pulizia sappia su quale tipo di pavimento si trova. La tecnologia a ultrasuoni è in grado di determinare la durezza di un obiettivo, in base all’intensità dell’ampiezza di eco ricevuta osservata dal sensore. Le superfici più dure, come le piastrelle, riflettono un’eco più forte rispetto alle superfici morbide, come i tappeti.
Sono necessarie barriere fisiche per evitare che gli assistenti robotizzati cadano dalle rampe di scale, in quanto queste cadute possono causare costosi malfunzionamenti. Una soluzione consiste nell’implementare sensori di rilevamento del dislivello per evitare questi pericoli. L’immunità dei sensori a ultrasuoni nei confronti della polvere li rende una soluzione affidabile per applicazioni di rilevamento del dislivello, considerando che il sensore viene installato al di sotto del robot.
Teoria di funzionamento degli ultrasuoni
I sensori a ultrasuoni emettono onde sonore ad alta frequenza al di sopra del limite superiore dell’udito umano. Il tempo necessario affinché l’onda sonora emessa rimbalzi e torni al trasduttore determina la distanza tra l’oggetto e il sensore, come mostrato in Figura 1. La distanza è calcolata moltiplicando il tempo di volo per la velocità del suono e dividendo per due.
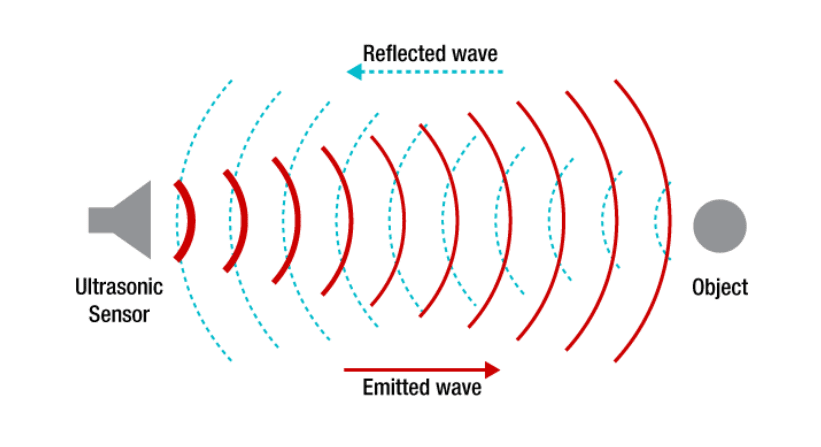
Figura 1. Teoria di funzionamento dei sensori a ultrasuoni
Configurazione hardware
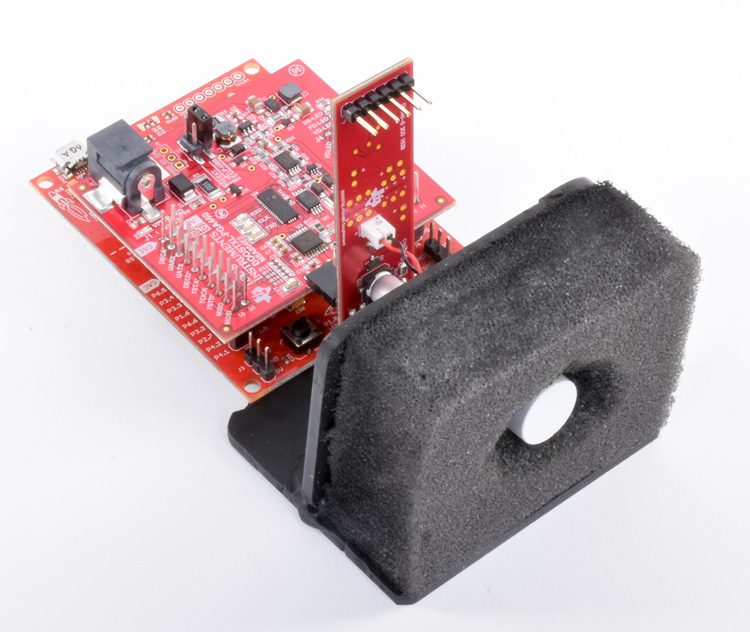
Il BOOSTXL-PGA460 è stato utilizzato in tutti gli esperimenti riportati in questo documento. Il PGA460 è un driver trasduttore e condizionatore di segnale a ultrasuoni.
Per ottimizzare le prestazioni del sistema, è importante considerare la frequenza e la topologia del trasduttore. All’aumentare della frequenza, aumentano anche la risoluzione, la direttività e l’attenuazione, mentre si riduce la distanza misurabile. La topologia definisce se il trasduttore è dotato di emettitore e ricevitore combinati (monostatico) o se sono indipendenti sotto forma di coppia dedicata (bistatico).
La Tabella 1 mostra i vantaggi e gli svantaggi di ciascun tipo di trasduttore. La Tabella 2 mostra come la topologia influisce sull’efficacia della scelta del trasduttore.
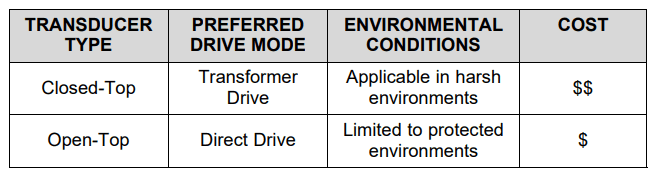
Tabella 1. Tipo di trasduttore
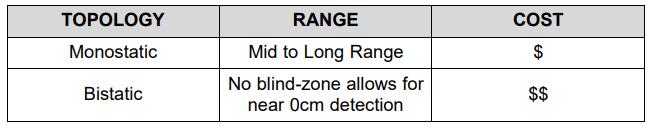
Tabella 2. Topologia del trasduttore
La Figura 2 mostra come il BOOSTXL-PGA460 è stato impostato per simulare queste applicazioni.
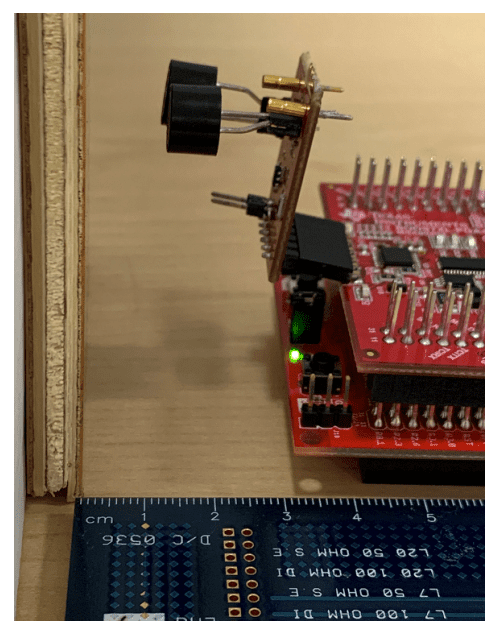
Figura 2. Configurazione di test di BOOSTXL-PGA460
Rilevamento del tipo di pavimento
La Figura 3 mostra una rappresentazione ad alto livello del rilevamento del tipo di pavimento utilizzando il rilevamento a ultrasuoni. Per le superfici dure, la risposta dell’eco si satura, mentre le superfici morbide presentano una risposta dell’eco debole. Per questo esperimento è stata utilizzata la coppia trasduttore bistatica UTR-1440K-TT-R a 40 kHz di PUI Audio.
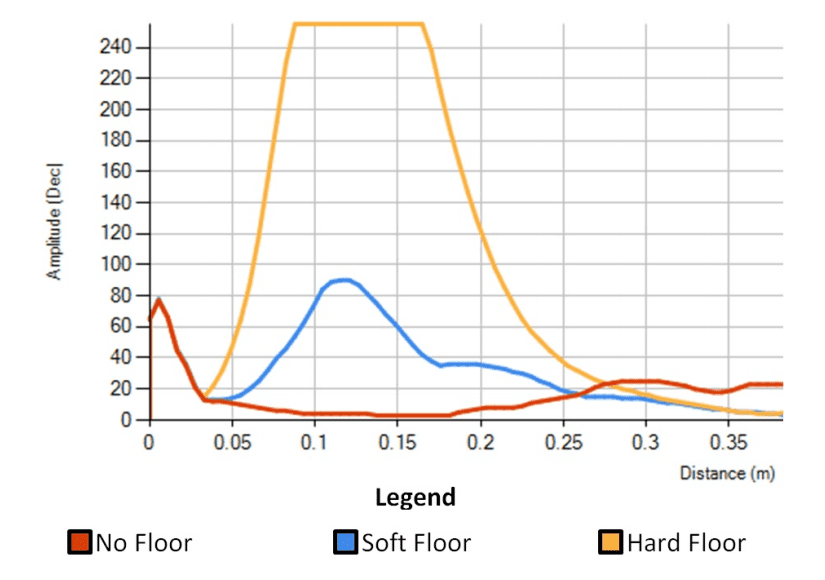
Figura 3. Rilevamento del tipo di pavimento
La Figura 4 mostra le risposte dell’eco per tipi di pavimento in legno duro, piastrelle e tappeto che distano 1 cm dalla superficie, a causa dello spazio limitato fra il punto di montaggio del sensore e il pavimento). Grafico mostra come la risposta dell’eco varia leggermente tra le varie superfici. Ad esempio, il tappeto è una superficie estremamente porosa, pertanto assorbe maggiormente il suono, che non viene riflesso. Le piastrelle, invece, sono un materiale duro che permette un’efficace riflessione delle onde sonore, ottenendo una risposta in ampiezza maggiore. Con queste informazioni, il robot aspirapolvere è in grado di determinare il tipo di pavimento su cui si trova. Per questo esperimento sono stati utilizzati il trasmettitore MuRata MA40S4S e il ricevitore MuRata MA40S4R in una configurazione bistatica per ottenere un raggio di rilevamento inferiore a 5 cm, in quanto non vi è alcuna zona cieca.
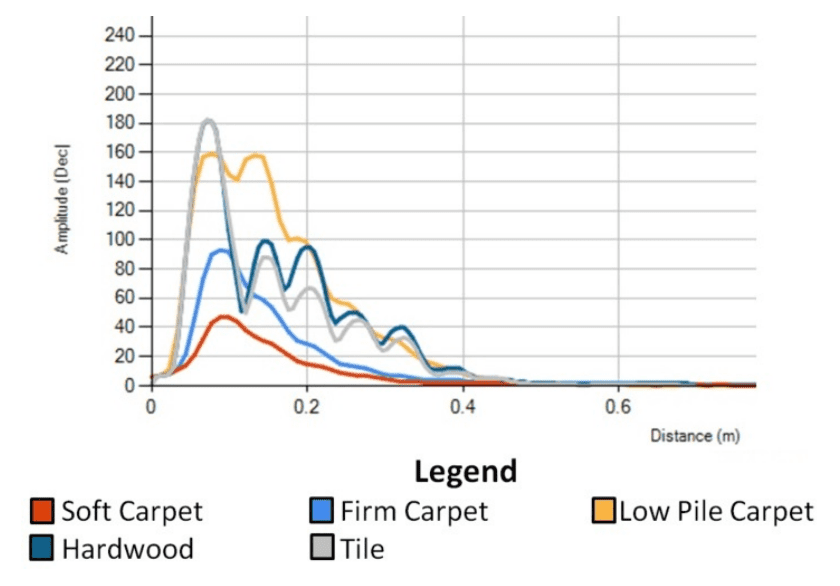
Figura 4. Risposta dell’eco tra le diverse superfici
Rilevamento del dislivello
È fondamentale che il robot aspirapolvere sia in grado di riconoscere quando si sta avvicinando a un dislivello, in modo che il sistema possa cambiare direzione ed evitare una caduta improvvisa.
Il trasduttore è montato 1 cm al di sopra del pavimento, pertanto il robot si ferma e cambia direzione se rileva una distanza superiore a 1 cm. La Figura 5 mostra la risposta dell’eco del legno duro ad una distanza di 1 cm dalla coppia di trasduttori, insieme a diversi campioni di pavimento che distano 20 cm dalla coppia di trasduttori, che corrispondono ad un’altezza standard di uno scalino in una casa americana. In una configurazione bistatica con trasmettitore e ricevitore dedicati, non si osserva alcun tempo di smorzamento del trasduttore.
A causa dell’ampio campo visivo del trasduttore, quest’ultimo non è stato in grado di rilevare un dislivello fino a quando il sensore non ha oltrepassato il bordo in legno duro per 2 cm; pertanto, un trasduttore con un campo visivo più stretto è consigliabile per un più rapido rilevamento del dislivello.
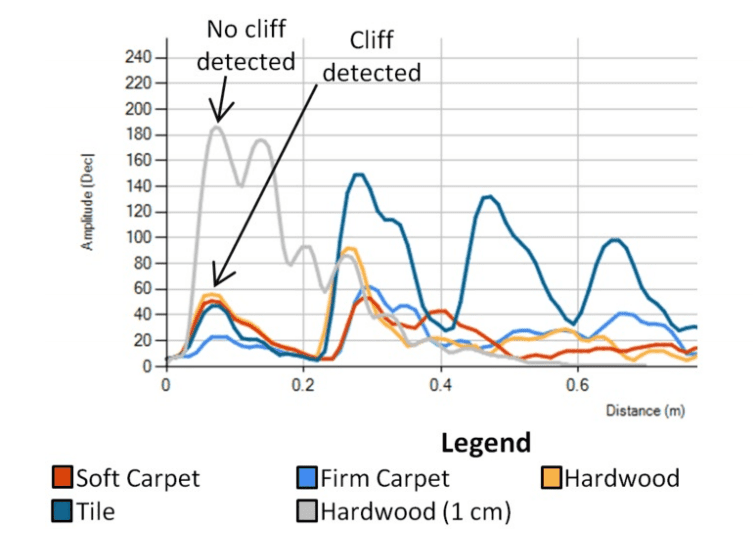
Figura 5. Rilevamento del dislivello a 20 cm
Dispositivi consigliati
Il rilevamento a ultrasuoni è vantaggioso per le applicazioni di robot aspirapolvere in quanto permette di rilevare sia il dislivello che il tipo di pavimento. TI consiglia ai progettisti di utilizzare in queste applicazioni un trasduttore a parte superiore chiusa in una configurazione bistatica, in quanto il trasduttore si troverà esposto alla polvere e allo sporco e richiederà la capacità di rilevamento a corto raggio.
Ulteriori informazioni sono disponibili sul sito ti.com/ultrasonic.