MOSFET e IGBT di potenza sono dispositivi controllati in tensione, utilizzati come elementi di commutazione in circuiti di alimentazione e controllo motori, nonché in diversi altri sistemi. Il gate è il terminale di controllo elettricamente isolato di ciascun dispositivo. Gli altri terminali di un MOSFET sono source e drain, mentre per un IGBT vengono definiti collettori (collector) ed emettitori (emitter). Per far funzionare un MOSFET o un IGBT si deve di solito applicare una tensione al gate relativa ai terminali source o emitter del dispositivo. Per applicare la tensione e fornire la corrente di pilotaggio al gate del dispositivo di potenza, si utilizzano driver dedicati. Il presente articolo descrive in cosa consistono i gate driver, perché sono necessari e come vengono definiti i rispettivi parametri fondamentali, quali timing, potenza di pilotaggio e isolamento.
NECESSITÀ DI UN GATE DRIVER
La struttura di un MOSFET o IGBT di potenza è tale per cui il gate forma un condensatore non-lineare. L’applicazione di una carica sul condensatore di gate attiva il dispositivo di potenza, consentendo il flusso di corrente tra i terminali drain e source, mentre la scarica dello stesso lo disattiva e permette di raggiungere una differenza di potenziale elevata tra drain e source.
La tensione minima alla quale la capacità di gate viene caricata e il dispositivo è prossimo alla conduzione, viene definita tensione di soglia (VTH). Per far lavorare un MOSFET o un IGBT di potenza come switch, tra il terminale di gate e quello di source/emitter si deve applicare una tensione superiore a quella di soglia VTH.
Consideriamo un sistema digitale con un microcontrollore in grado di generare un segnale PWM da 0 V a 5 V su uno dei suoi pin di I/O. Questo PWM non sarebbe sufficiente per accendere pienamente un power MOSFET/IGBT utilizzato nei sistemi di potenza, poiché la sua tensione di overdrive è superiore alle tensioni standard delle logiche CMOS/TTL. Per questa ragione è richiesta una interfaccia tra la circuiteria logica di controllo e lo switch di potenza.
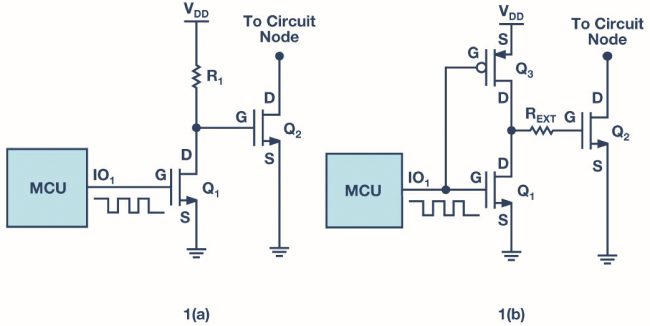
Questo sistema può essere implementato pilotando un MOSFET n-channel di tipo logic-level, che a sua volta può pilotare un power MOSFET. In questo caso, quando IO1 invia un segnale basso la tensione di gate di Q1 è inferiore alla tensione di soglia (VGSQ1 < VTHQ1), pertanto il MOSFET Q1 rimane spento. Ne consegue che un segnale positivo viene applicato al gate del power MOSFET Q2. La capacità di gate di Q2 (CGQ2) si carica attraverso la resistenza di pull-up R1 e la tensione di gate viene portata a quella di alimentazione VDD.
Dato che la tensione di alimentazione VDD è più alta della tensione di soglia di Q2 (VDD > VTHQ2), Q2 si accende e può condurre. Quando l’uscita IO1 si porta alta, il MOSFET Q1 si accende e la capacità CGQ2 si scarica attraverso Q1.
La tensione drain-source di Q1 va quindi verso 0V (VDSQ1 ~ 0 V) dopodiché la tensione di gate del MOSFET Q2 va sotto la tensione di soglia di Q2 (VGSQ2 < VTHQ2) e di conseguenza Q2 si spegne. Un problema, con questo tipo di setup, è la potenza dissipata da R1 mentre Q1 è acceso. Per superare questo problema, il pMOSFET Q3 può essere utilizzato come pull up per lavorare in maniera complementare rispetto a Q1. Il PMOS ha una resistenza che è bassa in conduzione e molto elevata quando è spento, per cui la dissipazione di potenza nel circuito di pilotaggio risulta notevolmente ridotta. Per controllare la velocità dei fronti di commutazione durante la transizione di gate, si aggiunge una piccola resistenza esterna tra il drain di Q1 e il gate di Q2. Un altro vantaggio dei MOSFET è la facilità di fabbricazione su silicio (die), al contrario di quanto accade per una resistenza. Questa particolare interfaccia di pilotaggio del gate di uno switch di potenza può essere realizzata sotto forma di un circuito integrato monolitico, che accetta tensioni di tipo logic-level e genera una potenza d’uscita ben più elevata rispetto al segnale di pilotaggio. Sebbene un dispositivo gate driver di questo tipo avrà sempre della circuiteria addizionale per offrire ulteriori funzionalità, la sua funzione primaria rimane quella di amplificatore di potenza e traslatore di livello.
PARAMETRI PRINCIPALI DI UN GATE DRIVER
Forza di pilotaggio.
Il problema di fornire una tensione appropriata al gate viene affrontato utilizzando un gate driver che svolga la funzione di traslatore di livello. Il condensatore di gate, tuttavia, non può modificare la propria tensione istantaneamente, perciò un FET o un IGBT di potenza hanno un intervallo di commutazione finito, diverso da zero. Durante la commutazione, il dispositivo può trovarsi in uno stato di alta corrente e alta tensione, dissipando potenza sotto forma di calore. La transizione quindi, da uno stato all’altro, deve essere veloce al fine di minimizzare il tempo di commutazione. Per raggiungere tale risultato, è necessario un transitorio ad alta corrente per caricare e scaricare rapidamente il condensatore di gate.
Un driver in grado di gestire una corrente di gate più elevata per un periodo più lungo consente un tempo di commutazione più breve e, di conseguenza, una perdita di commutazione minore nel transistor che sta pilotando. I valori di corrente in source e sink dei pin di I/O di un microcontrollore arrivano generalmente fino a qualche decina di milliampere, mentre i gate driver sono in grado di fornire una corrente assai più elevata.[boris]
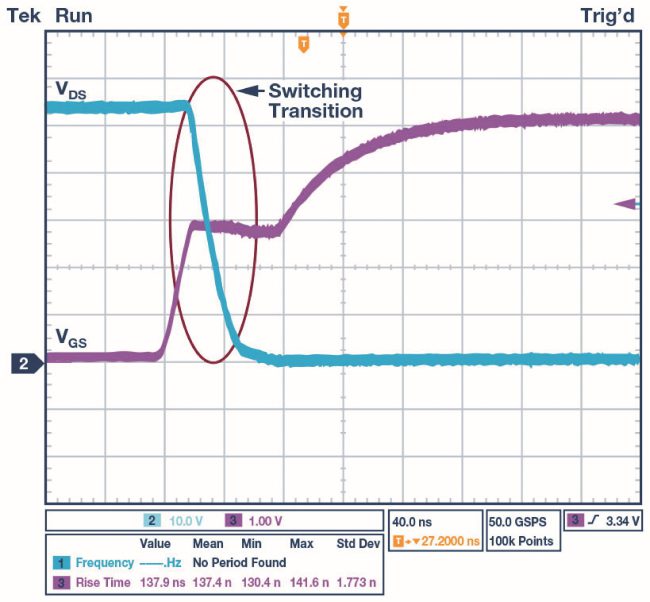
Nella figura si può osservare un intervallo di commutazione piuttosto lungo, in cui un MOSFET di potenza viene pilotato da un pin di I/O di un microcontrollore alla massima corrente erogabile.
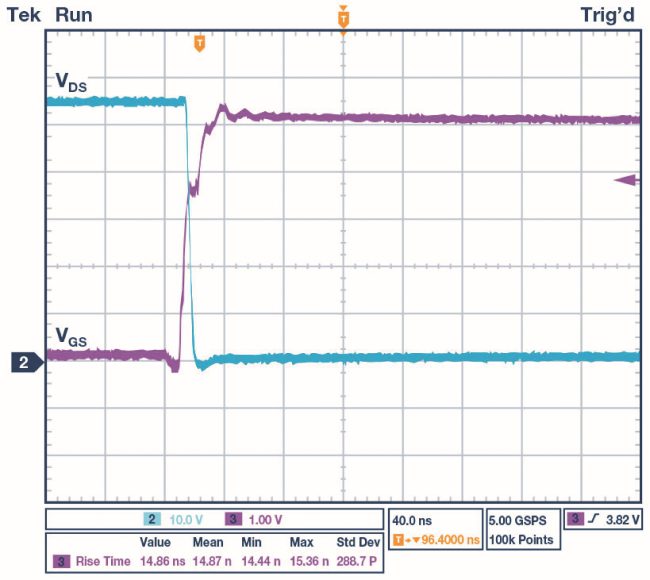
Come si vede, pilotando lo stesso MOSFET di potenza, il tempo di transizione si riduce notevolmente con l’impiego di un gate driver isolato ADuM4121, che fornisce una corrente di pilotaggio molto più elevata di quella di un pin di I/O di un microcontrollore. In molti casi pilotare MOSFET/IGBT di alta potenza direttamente da un microcontrollore potrebbe surriscaldare e danneggiare il controllore stesso a causa di un possibile eccessivo assorbimento di corrente dal circuito digitale. Un gate driver con capacità di pilotaggio più elevate permette una commutazione veloce con tempi di salita e discesa di pochi nanosecondi, riducendo la perdita di potenza durante la commutazione ottenendo quindi un sistema più efficiente. Per questo motivo, in generale, la corrente di pilotaggio è considerata un parametro importante nella scelta dei gate driver.
Oltre al valore della corrente di pilotaggio, un altro parametro altrettanto importante è la resistenza di conduzione drain-source (RDS(ON)) di un gate driver. Anche se idealmente il valore RDS(ON), per un MOSFET dovrebbe essere zero quando è acceso, il valore reale si colloca di solito nell’intervallo di qualche ohm a causa della sua struttura fisica: ciò tiene conto della resistenza di serie complessiva nel flusso di corrente drain-source. La resistenza di RDS(ON) è la vera base per ponderare la massima forza di pilotaggio di un gate driver, dato che limita la corrente di gate che può essere fornita dal driver stesso. Il valore RDS(ON) degli switch interni determina la corrente di sink e source, ma le resistenze di serie esterne sono utilizzate per ridurre la corrente di pilotaggio, alterando la velocità dei fronti di commutazione.
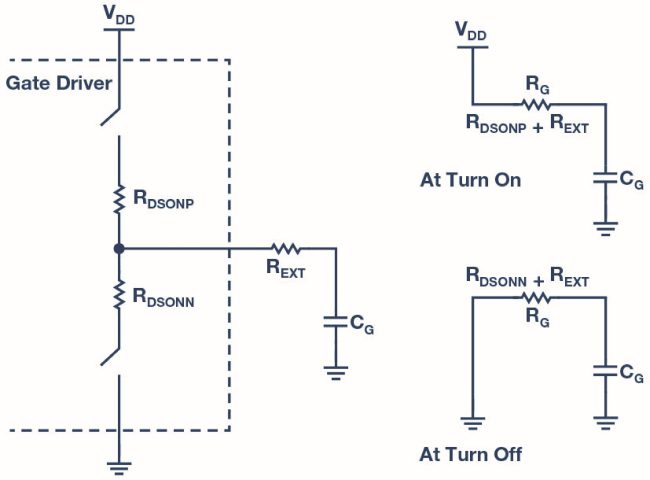
La resistenza di accensione sul high-side più la resistenza di serie esterna REXT formano il resistore di gate nel percorso di carica, mentre la resistenza di accensione sul low-side con REXT forma il resistore di gate nel percorso di scarica.
La resistenza di RDS(ON) influenza anche la dissipazione di potenza interna al driver in modo diretto. Per una determinata corrente di pilotaggio, un valore più basso di RDS(ON) consente l’impiego di valori REXT più elevati. Poiché la dissipazione di potenza è distribuita tra REXT e RDS(ON), un valore di REXT più alto fa sì che all’esterno del driver venga dissipata una potenza maggiore. Quindi, per migliorare l’efficienza di sistema e per evitare qualsiasi esigenza di regolazione termica all’interno del driver, a parità di superficie del die e dimensioni del circuito integrato, si preferisce disporre di un valore RDS(ON) più basso.
Timing.
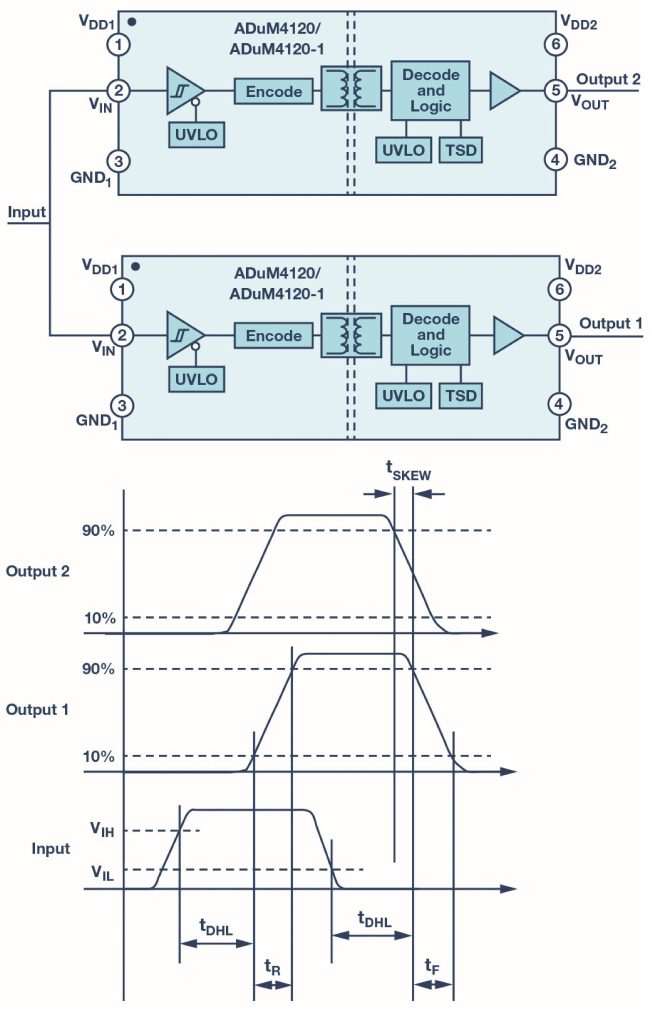
I parametri di timing di un gate driver sono essenziali ai fini della valutazione delle sue prestazioni. Una specifica di timing comune a tutti i gate driver incluso l’ADuM4120, illustrata in figura, è costituita dal ritardo di propagazione (tD) del driver, che viene definito come il tempo impiegato da un fronte d’ingresso per propagarsi verso l’uscita. Come si evince, il ritardo di propagazione dei fronti ascendenti (tDLH) può essere definito come il tempo che intercorre tra l’istante in cui il fronte di ingresso va al di sopra della soglia più alta (VIH) e quello in cui l’uscita va oltre il 10% del proprio valore finale. Allo stesso modo, il ritardo di propagazione dei fronti discendenti (tDHL) può essere determinato come il tempo che intercorre tra l’istante in cui il fronte di ingresso scende al di sotto della soglia inferiore VIL e quello in cui l’uscita scende sotto il 90% del suo livello più alto. Il ritardo di propagazione per la transizione d’uscita può essere diverso nel caso di un fronte ascendente e discendente.
La figura illustra anche i tempi di salita e discesa del segnale. Le velocità di questi fronti sono condizionate dalla corrente di pilotaggio che un componente è in grado di erogare, ma dipendono anche dall’entità del carico pilotato e, nel calcolo del ritardo di propagazione, non se ne tiene conto. Un altro parametro di timing è la distorsione della larghezza di impulso, ovvero la differenza tra il ritardo di propagazione ascendente e discendente sullo stesso componente. “Pulse width distortion” (PWD) = |tDLH – tDHL|.
A causa delle tolleranze tra transistor, all’interno di componenti diversi, il ritardo di propagazione di due componenti non sarà mai esattamente lo stesso, generando un disallineamento (tSKEW) del ritardo di propagazione, definito come l’intervallo di tempo tra le transizioni d’uscita di due componenti diversi, che reagiscono allo stesso segnale d’ingresso nelle medesime condizioni operative. Lo skew del ritardo di propagazione è definito componente-componente. Per componenti che dispongono di più di un canale d’uscita, questa specifica viene applicata nello stesso modo, ma l’annotazione dello skew viene definita canale-canale. Normalmente, nel circuito di controllo lo skew del ritardo di propagazione non può essere tenuto in considerazione.
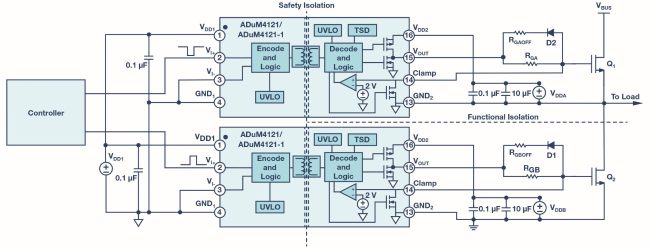
La figura illustra un setup tipico dei gate driver ADuM4121 utilizzati con i MOSFET di potenza in configurazione half-bridge, per applicazioni destinate ad alimentatori e al pilotaggio di motori elettrici. In un setup di questo genere, se Q1 e Q2 sono entrambi accesi nello stesso istante, si rischia il cosidetto “shoot-through” ovvero il cortocircuito tra alimentazione e terminali di terra, che potrebbe causare un danno permanente agli switch e perfino al circuito di pilotaggio. Per evitare lo shoot-through si devono inserire dei tempi morti nel sistema, di modo che le possibilità che entrambi gli switch siano contemporaneamente accesi vengano notevolmente ridotte. Durante gli intervalli di tempo morto, il segnale di gate è basso su entrambi gli switch e, di conseguenza, gli stessi switch si trovano idealmente in stato spento. Se lo skew dovuto al ritardo di propagazione è minore, i tempi morti richiesti sono più brevi e il controllo diventa più predicibile. La disponibilità di valori bassi di skew e di tempi morti più brevi si traduce in un funzionamento più uniforme ed efficiente del sistema.
Le caratteristiche di timing sono importanti, poiché condizionano la velocità di funzionamento dello switch di potenza. La comprensione di questi parametri fa sì che la progettazione del circuito di controllo risulti più semplice e accurata.
Isolamento.
Consiste nella separazione elettrica tra i vari circuiti funzionali di un sistema, di modo che tra questi non esista un percorso di conduzione diretto, permettendo ai singoli circuiti di possedere potenziali diversi rispetto a terra. Segnali e/o alimentazione possono comunque passare attraverso circuiti isolati, usando metodi induttivi, capacitivi o ottici. Per un sistema dotato di gate driver, l’isolamento può essere necessario a scopi funzionali e potrebbe anche essere un requisito di sicurezza. Come mostrato, in un determinato momento si potrebbe avere una tensione di VBUS a centinaia di volt con decine di ampere di corrente che scorrono attraverso Q1 o Q2. In una qualsiasi eventualità di guasto di tale sistema, se il danno è limitato ai componenti elettronici, l’isolamento di sicurezza potrebbe non essere necessario; ma nel caso vi sia un coinvolgimento umano nella parte di controllo, l’isolamento galvanico tra il lato ad alta potenza e il circuito di controllo a bassa tensione diventa un requisito necessario. Ciò offre una protezione nei confronti di qualsiasi guasto che può incorrere nella sezione ad alta tensione, poiché la barriera isolante impedisce all’energia elettrica di raggiungere l’utente a seguito di danneggiamenti o guasti dei componenti.
L’isolamento è reso obbligatorio dagli enti certificatori e di controllo della sicurezza, allo scopo di prevenire il rischio di folgorazione. Inoltre esso protegge l’elettronica a bassa tensione da qualsiasi danno possa derivare da guasti che si verificano sulla parte ad alta potenza. Ci sono diversi modi per descrivere l’isolamento di sicurezza, ma fondamentalmente fanno tutti riferimento alla tensione di rottura della barriera isolante. Tale tensione viene fornita in genere per tutta la vita utile del driver, così come per transitori di tensione di durata e profilo specifici. Tali livelli di tensione sono anche proporzionati alle dimensioni fisiche del circuito integrato del driver e alla distanza minima tra i pin lungo la barriera isolante.
Oltre a motivi di sicurezza, l’isolamento può essere essenziale per un corretto funzionamento del sistema. La figura precedente mostra una topologia a semi-ponte comunemente utilizzata nel circuito di pilotaggio di un motore elettrico dove, in un determinato momento, solamente uno switch è acceso. Dal versante ad alta potenza, il transistor di low-side Q2 ha il proprio terminale source collegato a terra: in questo modo la tensione gate-source di Q2 (VGSQ2) è riferita direttamente a massa e il progetto del circuito di pilotaggio risulta relativamente semplice. Ciò non vale nel caso del transistor di high-side Q1, perché il suo source è il nodo che commuta e che può andare alla tensione di bus o a massa, a seconda di quale switch sia acceso. Per accendere Q1 si deve applicare una tensione positiva tra gate e source (VGSQ1) che superi il suo valore di soglia; quindi, la tensione di gate di Q1 dovrebbe essere più alta di VBUS quando si trova in stato acceso, perché il source si connette a VBUS. Se il circuito di pilotaggio non è isolato rispetto a massa, per pilotare Q1 sarà necessario disporre di una tensione superiore a VBUS: soluzione macchinosa, che non risulta pratica per un sistema efficiente. Pertanto, saranno necessari segnali di controllo con traslazione di livello, i quali prendono come riferimento il source del transistor high-side: questa soluzione è nota come isolamento funzionale e può essere implementata usando un gate driver isolato come l’ADuM4223.
Immunità al rumore.
I gate driver vengono utilizzati in ambienti industriali che per loro stessa natura presentano molte fonti di rumore. Il rumore può alterare i dati e rendere inaffidabile un sistema, portando al degrado delle prestazioni. Per questo motivo i gate driver devono possedere un buon livello di immunità al rumore per garantire l’integrità dei dati. L’immunità al rumore esprime la capacità di reiezione del driver rispetto all’interferenza elettromagnetica (EMI), rumore RF e transitori di modo comune.
Le EMI possono essere costituite da qualsiasi rumore elettrico o interferenza magnetica in grado di alterare il funzionamento previsto del dispositivo. L’interferenza elettromagnetica che condiziona il funzionamento dei gate driver è il risultato della commutazione ad alta frequenza dei circuiti e si crea principalmente a causa del campo magnetico emesso dai grandi motori elettrici industriali. La EMI può essere irradiata o condotta e può trasferirsi per accoppiamento a circuiti limitrofi. Ecco perché il parametro sull’immunità rispetto alle EMI, o immunità RF, si riferisce alla capacità di un gate driver di resistere alle interferenze elettromagnetiche e mantenere un buon funzionamento, privo di errori. Disporre di un’elevata immunità alle EMI permette di utilizzare i driver in stretta prossimità a grandi motori elettrici, senza causare problemi nella trasmissione dati.
Come illustrato nella figura precedente, ci si aspetta che la barriera di separazione fornisca isolamento ad alta tensione verso massa rispetto a potenziali diversi. La commutazione ad alta frequenza, tuttavia, produce transizioni di tensione da fronti molto brevi sul lato secondario. Tali transitori veloci si accoppiano da un lato all’altro a causa delle capacità parassite tra le parti isolate, portando a una probabile corruzione dei dati. Quest’ultima si può manifestare sotto forma di jitter, introdotto nel segnale di pilotaggio del gate drive, o nella completa inversione del segnale stesso, causando una diminuzione dell’efficienza o, in alcuni casi, perfino il sopra citato shoot-through. Uno dei parametri per definire i gate driver è necessariamente l’immunità ai transitori di modo comune (CMTI), la quale descrive quantitativamente la capacità di un gate driver isolato di resistere ad ampi transitori di modo comune tra il proprio ingresso e l’uscita. L’immunità di un driver deve essere alta qualora i valori di slew rate nel sistema siano elevati. Pertanto, i valori di CMTI sono particolarmente significativi lavorando ad alte frequenze e alte tensioni di bus.
CONCLUSIONI
Questo articolo ha lo scopo di fornire uno sguardo puramente introduttivo ai gate driver. Di conseguenza, i parametri discussi finora non rappresentano un insieme esaustivo, rispetto alle specifiche complete di un gate driver isolato.
Ci sono altri parametri dei driver quali tensione d’alimentazione, temperatura massima ammissibile, pinout, ecc. che sono comuni a qualsiasi altro componente elettronico. Alcuni driver come l’ADuM4135 e l’ADuM4136 incorporano a loro volta caratteristiche di protezione o sistemi avanzati per il sensing o il controllo. Per un progettista di sistema, la varietà di gate driver isolati disponibili sul mercato rende imperativo comprendere a fondo tutte queste specifiche e caratteristiche tecniche, al fine di prendere decisioni consapevoli sull’uso dei driver appropriati nelle applicazioni di pertinenza.
A cura di Sanket Sapre