Non ci sono prodotti a carrello.
Le autovetture utilizzano protocolli di comunicazione come Controller Area Network (CAN), Local Interconnect Network (LIN), FlexRay, Media Oriented Systems Transport (MOST) ed Ethernet per la comunicazione tra diverse centraline elettroniche (ECU). Ad esempio, un modulo di controllo per la carrozzeria (BCM) comunica con un sensore di pioggia tramite LIN. Analogamente, uno strumento di scansione diagnostica a bordo comunica con le centraline di un’auto tramite CAN o Ethernet.
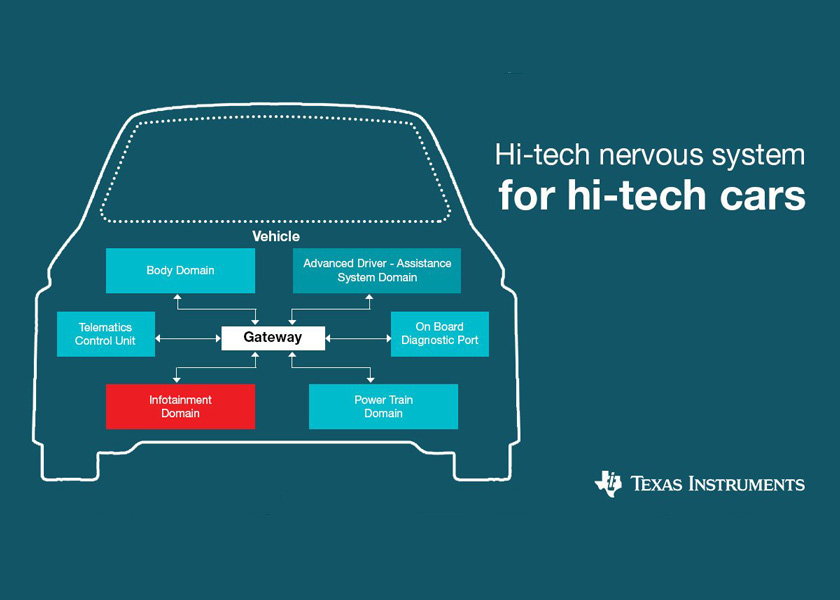
Affinché queste ECU possano comunicare e scambiarsi i dati, necessitano di un sistema che faccia da ponte tra vari domini e protocolli. Ed è qui che entrano in gioco i gateway. Come mostra la Figura 1, i gateway collegano diverse ECU traducendo i dati da un protocollo a un altro prima di inoltrarli al destinatario previsto.
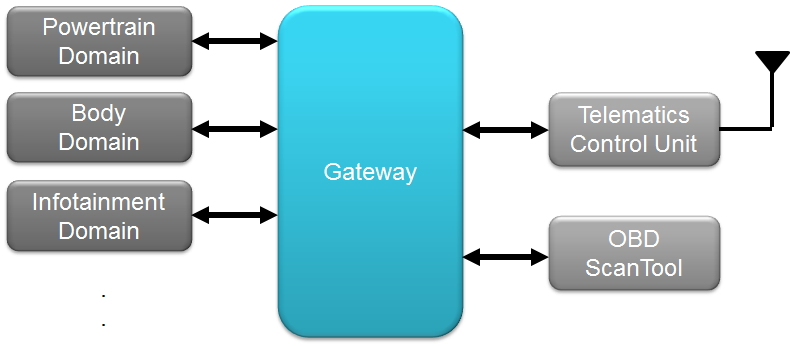
Figura 1: Tipica configurazione di rete di un veicolo con il gateway in evidenza.
La Figura 2 mostra un tipico schema a blocchi di un modulo gateway.
Come mostrato dalla figura, un gateway è un insieme composto dai livelli fisici di un’interfaccia di comunicazione (PHY), da un processore e dai rispettivi dispositivi di gestione dell’alimentazione.
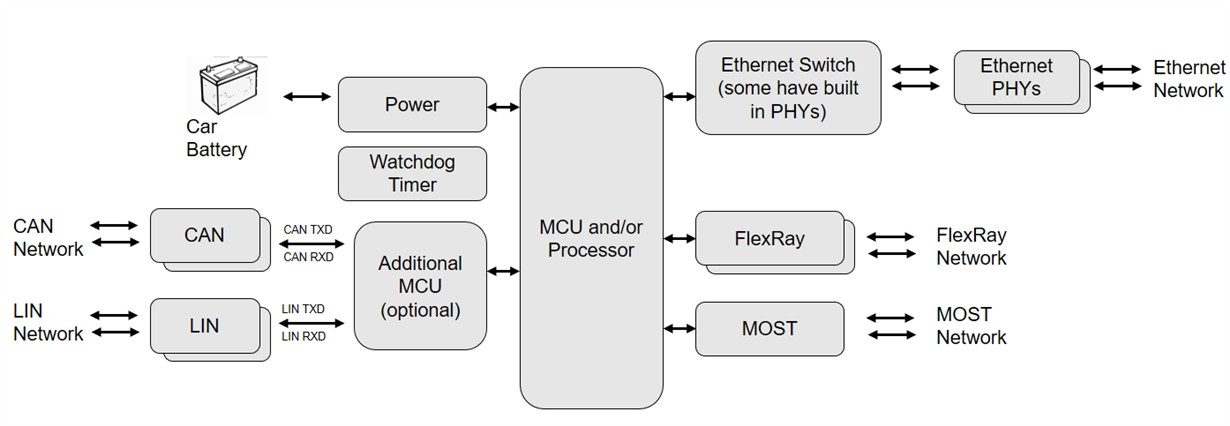
Figura 2: Schema a blocchi di un gateway per automotive.
A mano a mano che aumenta il livello di connessione delle auto, esse richiedono più dati: di conseguenza, Ethernet si è diffuso maggiormente nelle automobili e i gateway si sono evoluti per soddisfare questa esigenza. Mentre i gateway più vecchi utilizzano dei microcontroller (MCU) più piccoli e più semplici come controller, i gateway più recenti impiegano dei processori, a volte con una MCU supplementare. La differenza tra processore e MCU è la memoria: i processori hanno memoria esterna, mentre le MCU memorizzano tutto su chip.
Perché si è passati ai processori? Parte della spiegazione dipende da una questione di supporto. Molti processori integrano Ethernet e il software per supportare tale protocollo. I processori con più memoria possono eseguire sistemi operativi diffusi, come Linux, che consentono una maggiore portabilità e riducono i tempi di sviluppo. Inoltre, alcune ECU dispongono di funzionalità gateway integrate. Utilizzando un processore multicore della famiglia Jacinto di Texas Instruments, ad esempio, è possibile separare le attività relative alle funzionalità della ECU dalle funzionalità del gateway. Separando le attività si assegna a ciascun core un carico minore, consentendo ai rispettivi clock di operare ad una velocità inferiore, pur permettendo loro di soddisfare i requisiti in tempo reale di un gateway.
Un’ulteriore ragione del passaggio da MCU a processori è la quantità di potenza di elaborazione necessaria per la traduzione dei dati tra i vari domini di comunicazione. Ethernet è molto più veloce di CAN o LIN, con il singolo doppino ritorto 100BASE-T1 che funge da apripista verso l’Ethernet automotive. I gateway devono essere in grado di tenere il passo con velocità da 100 Mbps e, prima o poi, a livello di gigabit. Inoltre, alcuni gateway possono includere otto o più porte CAN e da 10 a 12 porte Ethernet. Se a tutto ciò si aggiunge la natura cruciale delle comunicazioni in termini di tempo, è evidente la necessità di molta più potenza di elaborazione rispetto a quella che può fornire una MCU.
Come già accennato, molti gateway dispongono di varie porte per ciascun protocollo: più di quante ne abbia un processore. Mentre uno switch Ethernet esterno può essere in grado di gestire Ethernet, altri protocolli come CAN e LIN necessitano di una soluzione diversa. Una MCU supplementare può fornire tali porte per il gateway e inoltrare i dati al processore, sfruttando al tempo stesso la potenza di calcolo di un processore per tradurre e inoltrare i pacchetti da un dominio a un altro.
Il progetto di riferimento per gateway stand-alone per automotive con Ethernet e CAN di Texas Instruments fornisce un elemento costruttivo per gateway con supporto Ethernet e CAN. Dotato di un processore JacintoTM DRA710 con due porte Ethernet (una con protocollo 100BASE-TX e una con 100BASE-T1), dispone di due porte CAN e di una struttura di potenza associata.
Risorse supplementari:
- Ulteriori informazioni sul Progetto di riferimento per gateway stand-alone per automotive con Ethernet e CAN
- Per saperne di più sui Processori per l’infotainment Jacinto
- Per saperne di più sui Moduli di controllo carrozzeria