Min Su You Sr. Marketing Manager – Advanced Solutions Group (onsemi)
Nel momento in cui i veicoli diventano sempre più sofisticati, contribuendo così ad aumentare la sicurezza stradale, migliorare l’assistenza al conducente e incrementare l’efficienza, cresce l’importanza della tecnologia di base utilizzata. Sia che si tratti di un veicolo tradizionale con motore a combustione interna (ICE), ibrido oppure completamente elettrico, i progetti dei moderni autoveicoli contemplano la presenza di decine di sensori, microcontrollori e azionamenti, tutti in grado di generare (o utilizzare) una notevole mole di dati. Più che di soluzioni adibite solamente al trasporto, i moderni veicoli sono assimilabili a piattaforme di elaborazione avanzate su ruote. Così come accade per tutti i sistemi di elaborazione, la possibilità di trasferire i dati in maniera efficiente è essenziale per il funzionamento fluido e sicuro di questi sistemi.
Le più diffuse tecnologie IVN (In-Vehicle Networking)
L’elettronica, utilizzata a bordo dei veicoli da svariati decenni, è in grado di fornire funzionalità utili, spesso finalizzate a incrementare la sicurezza o migliorare l’intrattenimento. All’inizio, molte di queste funzioni erano autonome, non fornivano dati ad altri sistemi del veicolo né si basavano su dati provenienti da questi ultimi. Tuttavia, l’evoluzione della tecnologia ha permesso di comprendere i vantaggi dell’integrazione e favorito lo sviluppo di tecnologie di connessione in rete specifiche per il settore automobilistico. Tra i più diffusi protocolli utilizzati nei veicoli si possono annoverare LIN (Local Interconnect Network), CAN/CAN-FD (Controller Area Network), FlexRay e MOST (Media Oriented System Transport). Si tratta in ogni caso di soluzioni a sé stanti, che non solo richiedono considerazioni di progetto specifiche, ma evidenziano anche limitazione che non permettono di soddisfare le esigenze dei moderni veicoli. Di seguito una sintetica descrizione delle caratteristiche dei principali protocolli (Fig. 1):
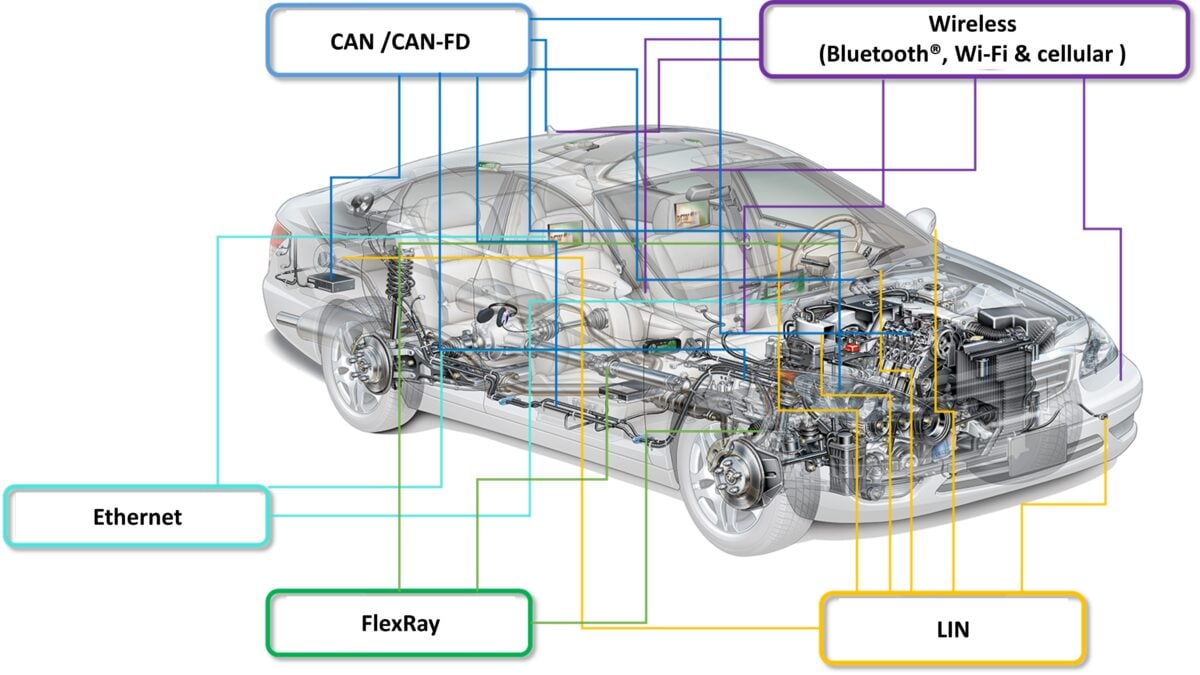
Fig. 1 – Per l’uso all’interno di un veicolo sono stati sviluppati numerosi protocolli di comunicazione
LIN: si tratta di una tecnologia economica semplice da implementare e adatta per applicazioni caratterizzate da basse velocità di trasferimento dati (<20 kbps). L’ampiezza di banda ridotta e il supporto di soli 12 nodi rappresentano un limite per l’uso nei moderni veicoli.
CAN (e le sue successive evoluzioni come CAN-FD): molto robusto e relativamente insensibile al rumore e alle interferenze elettriche, questo protocollo è stato ampiamente utilizzato nel settore automotive e in altri sistemi “safety-critical”. Tuttavia, la larghezza di banda ridotta (tipicamente attorno ai 2 Mbps) ne pregiudica l’uso in alcune applicazioni di tipo “data-intensive” (che richiedono la gestione di grandi quantità di dati), come quelle che coinvolgono i sistemi di infotainment e le telecamere, oltre a limitare il numero di nodi. Attualmente è in fase di sviluppo un nuovo standard, CAN-XL, in grado di gestire velocità più elevate e di supportare il “tunneling” del traffico Ethernet: per molti progettisti, tuttavia, il passaggio diretto a Ethernet appare la soluzione più logica.
FlexRay: in grado di assicurare temporizzazioni e sincronizzazioni precise, è adatto in applicazioni quali “drive-by-wire” (termine che indica in generale la sostituzione dei tradizionali sistemi di controllo meccanici con controlli elettronici) critiche sotto il profilo temporale. La sua complessità rispetto alle altre opzioni ha rappresentato un ostacolo alla sua diffusione.
MOST: utilizzato esclusivamente per applicazioni di infotainmet, a causa del suo limitato campo di impiego, abbinato al costo elevato, è stato progressivamente sostituito da altre soluzioni.
Ethernet: considerato da molti il successore di parecchie di queste soluzioni, è in grado di assicurare una comunicazione a bassa latenza ed estesa ampiezza di banda. Tuttavia, esiste un problema con i protocolli esistenti. Il protocollo CSMA/CD (Carrier Sense Multiple Access with Collision Detection) utilizzato da una rete Ethernet standard non consente il funzionamento in modalità deterministica, precludendone l’impiego in applicazioni “time-sensitive” (ovvero sensibili al fattore tempo), come il “drive-by-wire” (dove il controllo diretto di tipo meccanico è sostituito da un controllo di tipo elettronico). Il costo della tecnologia, inoltre, è un altro problema da tenere in considerazione. Tuttavia, considerate le potenzialità di Ethernet, sono stati sviluppati protocolli deterministici come 10BASE-T1S che, grazie alla funzione PLCA (Physical Layer Collision Avoidance) (Fig.2), permettono di ottenere le prestazioni richieste dalle applicazioni critiche dal punto di vista delle temporizzazioni. Oltre a ciò, il costo delle apparecchiature Ethernet è rapidamente diminuito, consentendo a un numero maggiore di Case automobilistiche di sfruttare l’elevata ampiezza di banda di questa tecnologia.
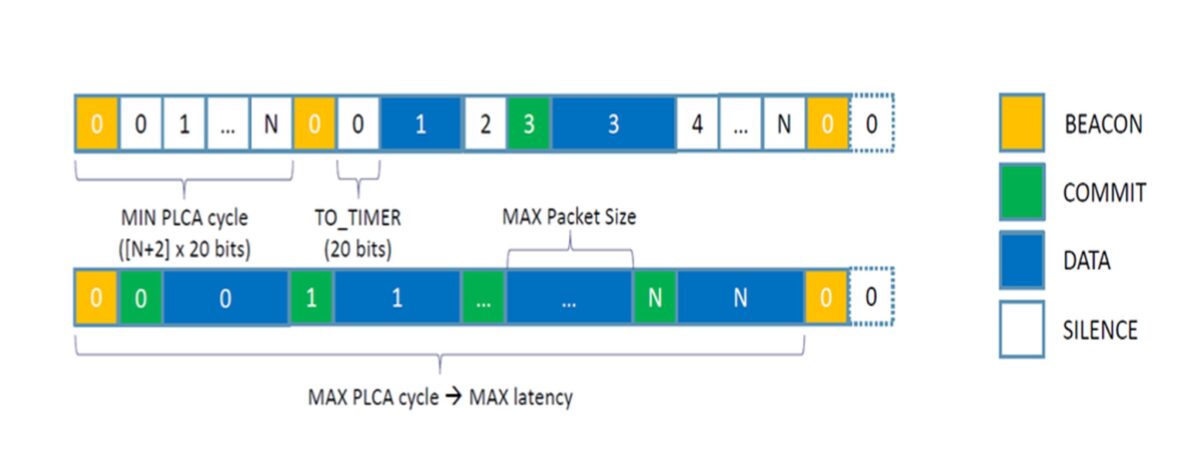
Fig. 2 – In un ciclo PLCA, il “Master” avvia la comunicazione attraverso un ‘BEACON’ prima che ogni “Slave” invii i dati, evitando le collisioni e il relativo sovraccarico dovuto alle ritrasmissioni
Ethernet è ovviamente in continua evoluzione per soddisfare la crescente “fame” di banda dei moderni autoveicoli e tutti i progressi sono supportati da organizzazioni come OPEN Alliance. Nuovi standard come IEEE P802.3dh consentiranno l’utilizzo della fibra ottica nei futuri veicoli, grazie alla quale sarà possibile implementare tecnologie avanzate come il video con risoluzione 4k a bassa latenza e la realtà aumentata. I protocolli wireless, tra cui Bluetooth®, Wi-Fi e cellulare, sono spesso impiegati dal conducente e dai passeggeri per collegare i loro dispositivi mobili. La domanda di comunicazioni wireless è alimentata dalla loro capacità di espletare compiti preclusi alle comunicazioni cablate: si pensi a esempio al monitoraggio della pressione degli pneumatici (TPMS – Tire Pressure Monitoring System) e all’apertura delle portiere senza chiavi. Grazie alla progressiva espansione della tecnologia V2X (Vehicle-to-Everything), che consente ai veicoli di comunicare con l’intero ecosistema di mobilità (inclusi altri veicoli, infrastrutture stradali, pedoni, reti di comunicazione e qualsiasi altra entità coinvolta nella mobilità intelligente), la domanda di comunicazioni wireless è destinata a crescere ulteriormente. In tale contesto, ovviamente, la sicurezza assume un’importanza critica.
Architetture dei veicoli
Poiché in un veicolo sono presenti numerosi sottosistemi e sensori, le Case automobilistiche devono scegliere con cura l’architettura del veicolo. Le opzioni principali sono due: architetture basate sui domini o a zone. Le architetture esistenti del primo tipo raggruppano elementi con funzionalità simili (come a esempio il sistema di trazione (drivetrain), lo chassis e le funzioni legate al comfort), che potrebbero essere ubicati lungo tutto il veicolo, anche a notevole distanza tra di loro, contribuendo ad aumentare peso e costo dei cablaggi. Per cercare di risolvere questo problema, molte Case automobilistiche ora preferiscono adottare un’architettura a zone, che prevede il raggruppamento di sottosistemi che, anche se assolvono funzioni diverse, si trovano in prossimità tra di loro. Le zone possono quindi essere designate come “anteriore destra”, “posteriore sinistra” e così via. Sebbene questo approccio riduca gli oneri legati al cablaggio, comporta la necessità di trasferire una maggiore quantità di dati sulla “dorsale” di comunicazione tra le varie zone del veicolo. Da qui l’esigenza di rete IVN in grado di assicurare migliori prestazioni e maggiore ampiezza di banda. Ciascuna zona è solitamente contraddistinta da un elevato grado di integrazione, con risorse di elaborazione dedicate che si collegano con la CPU principale attraverso una dorsale di comunicazione ad alta velocità (e di tipo deterministico) per assicurare il supporto delle applicazioni real-time, come ad esempio i sistemi ADAS e il “drive by wire”. L’adozione dell’architettura a zone assicura una maggiore flessibilità nelle fasi di integrazione, rimozione o aggiornamento delle caratteristiche e delle funzionalità del veicolo. Inoltre, il dimensionamento (scaling) e l’adattamento al variare dei requisiti risultano più semplici. Sebbene l’architettura a zone sia in grado di offrire numerosi vantaggi, la sua implementazione può comportare il ricorso a reti IVN caratterizzate da prestazioni migliori. Ciò è dovuto essenzialmente alla necessità di gestire un maggior traffico di dati, ridurre la latenza, supportare la ridondanza e la scalabilità e migliorare le funzionalità di sicurezza e diagnostica.
Sicurezza funzionale
Nel momento in cui i veicoli diventano sempre più autonomi, aumenta la necessità di garantire la sicurezza funzionale attraverso l’adozione di misure di ridondanza adeguate. Un numero sempre maggiore di sistemi richiede la conformità ai livelli ASIL (Automotive Safety Integrity Level) più elevati dello standard ISO26262. I componenti utilizzati devono quindi risultare conformi ai requisiti dei livelli ASIL C e D, (molto più severi rispetto a quelli dei livelli ASIL A e B), in quanto i conducenti fanno sempre più affidamento sulle decisioni prese e sulle azioni intraprese dal veicolo stesso. La sicurezza funzionale riguarda tutti gli aspetti della progettazione, dall’ideazione fino alla dismissione del veicolo. Indubbiamente, c’è un’influenza significativa sull’architettura complessiva del veicolo e, di conseguenza, sulla rete IVN. Nel caso di funzioni ADAS che richiedono elevate prestazioni, come ad esempio la frenata automatica di emergenza e il controllo adattivo della velocità di crociera, un trasferimento dati a bassa latenza è un requisito critico. L’adozione del concetto di ridondanza a livello dei sensori e dei percorsi di comunicazione, così come l’utilizzo di meccanismi “fault-tolerant” (tolleranti ai guasti) sofisticati sono essenziali per ottenere la conformità ai requisiti di sicurezza funzionale. Anche se la presenza di una rete TSN (Time Sensitive Networking) sia richiesta in tutti i veicoli per le funzioni “safety-critical”, il passaggio alle architetture a zone ha contribuito ad acuire questa esigenza. L’allineamento preciso delle temporizzazioni e la compensazione della latenza sono di fondamentale importanza per assicurare la corretta operatività di una funzione ADAS, specialmente nel caso in cui elementi come sensori di immagine, moduli LiDAR e dispositivi elettronici di controllo sono dislocati in differenti zone del veicolo. Anche in applicazioni quali la cancellazione del rumore, nel caso di microfoni distribuiti in varie zone, è necessario il ricorso a una rete TSN per garantire un funzionamento efficace. Per le soluzioni basate su Ethernet, esistono protocolli Ethernet TSN che possono essere riutilizzati in ambito automotive. Per quanto concerne sensori di immagine e telecamere, le interfacce MIPI CSI-2 (Camera Serial Interface) e DSI-2 (Display Serial Interface) supportano il trasferimento dati ad alta velocità e risultano quindi adatte per il trasferimento di grandi quantità di dati fra telecamere, display e sistemi di infotainment. Ulteriori sviluppi sono comunque in corso, con una soluzione SerDes standardizzata in fase di definizione da parte di MIPI Alliance e ASA (Automotive Serdes Alliance). L’obiettivo è l’approvazione dello standard ASA ML (ASA Motion Link) che prevede l’integrazione nativa con MIPI CSI-2. Nell’ambito di questa collaborazione, sono anche in corso ricerche finalizzate a migliorare la sicurezza dei protocolli MIPI e a implementare una tecnologia Ethernet di tipo asimmetrico per le telecamere (trasmissione ad elevata larghezza di banda, ricezione a bassa larghezza di banda).
Reti IVN: il ruolo di onsemi
Grazie a un impegno ultratrentennale nel settore IVN, onsemi è in grado di fornire prodotti innovativi e un supporto di prim’ordine per lo sviluppo di applicazioni. Attualmente, il portafoglio di soluzioni è basato su molte delle tecnologie per reti IVN esistenti, tra cui LIN, CAN e FlexRay. Nei prossimi anni, verranno introdotte versioni migliorate dei prodotti per i protocolli LIN e CAN, mentre per il protocollo FlexRay, che verrà progressivamente abbandonato, non sono previsti ulteriori investimenti. Ethernet 10BASE-T1S sarà ovviamente destinato a rivestire un ruolo di primo piano nel settore automotive. onsemi, che ha già introdotto i primi prodotti, sta attivamente lavorando allo sviluppo dei dispositivi di seconda generazione per questo importante protocollo. Poiché è prevedibile che la maggiori parte dei produttori di automobili adotterà l’architettura a zone, 10BASE-T1S sarà nel prossimo futuro un componente fondamentale della comunicazione in ambito automotive. Ciò è vero in particolar modo per le applicazioni che richiedono elevato throughput (velocità effettiva di trasferimento dati), estesa ampiezza di banda e maggiori livelli di sicurezza, come le funzioni ADAS, compresa la guida completamente autonoma. Nonostante gli evidenti vantaggi correlati all’uso di Ethernet a bordo di un veicolo, i protocolli più consolidati (come LIN e CAN) continueranno a essere impiegati laddove la velocità non rappresenta un aspetto critico, come a esempio apertura dei finestrini, specchietti ripiegabili, regolazione dei sedili e così via. In ogni caso, Ethernet sta già acquisendo una quota di mercato del protocollo CAN ed è previsto che diventerà a breve la tecnologia di riferimento per le comunicazione a estesa ampiezza di banda e latenza ridotta.
Considerazioni conclusive
Al giorno d’oggi, le prestazioni di un veicolo sono legate più che alla velocità, alla rapidità con la quale una rete IVN è in grado di trasferire i dati in quella che si può definire oramai definire una vera e propria “piattaforma di elaborazione su ruote”. Mentre alcuni protocolli “legacy” come LIN e CAN continueranno a essere impiegati, anche se in ruoli secondari, altri come MOST e FlexRay sono destinati a scomparire. L’architettura a zone diventerà prevalente, in quanto permette di ridurre peso e costo dei cablaggi, anche se richiede l’implementazione di reti TSN e un’ampiezza di banda più estesa, specialmente sulla dorsale tra le varie zone. Ethernet deterministico (10BASE-T1S) svolgerà un ruolo di primo piano, diventando la tecnologia standard per parecchie Case automobilistiche nel prossimo futuro. La sua crescente diffusione favorirà una maggiore standardizzazione nell’ambito delle reti IVN e consentirà lo sviluppo delle innovative soluzioni necessarie per arrivare al traguardo della guida completamente autonoma. Senza dimenticare che l’incremento dei livelli di sicurezza dei veicoli e la realizzazione di sistemi di guida autonoma sempre più avanzati saranno possibili solo grazie alle soluzioni basate su Ethernet. onsemi, dal canto suo, ha rivestito un ruolo di primo piano nel settore della tecnologia per applicazioni automotive, in particolar modo nel campo delle reti IVN. Anche se continuerà a proporre dispositivi con caratteristiche sempre migliori per LIN e CAN, onsemi focalizzerà la propria attenzione sullo sviluppo di soluzioni 10BASE-T1S che forniranno i componenti ad alte prestazioni capaci di soddisfare le esigenze delle applicazioni automotive della prossima generazione.