Non ci sono prodotti a carrello.
Scopriamo quali sono le metriche importanti per la progettazione di alimentatori che operano a svariati megahertz e in che modo le proprietà dei driver, un tempo ignorate, sono fondamentali per il corretto funzionamento.
L’industria sta adottando i transistor a effetto di campo (FET) in nitruro di gallio (GaN) per via della loro superiorità in termini di cifra di merito (FOM, figure-of-merit). Il GaN consente ai tecnici di progettare applicazioni ad alta frequenza che funzionano a svariati megahertz e di migliorare la densità di potenza complessiva a livelli prima impossibili.
A questo livello di velocità entrano in gioco alcuni aspetti al di là delle specifiche di base della scheda tecnica, che sono necessari per scegliere un driver FET appropriato. Questi parametri nascosti possono avere un impatto notevole sul progetto, poiché le elevate velocità operative non fanno che peggiorare ogni meccanismo di perdita.
Per rendere possibili le applicazioni ad alta frequenza è fondamentale ridurre al minimo le perdite ed è necessaria un’analisi accurata delle perdite per identificare le aree di miglioramento. Alcune aree di perdita vengono tipicamente trascurate nelle applicazioni di commutazione più lente, dove le perdite di conduzione dominano le perdite totali dei FET, ma a frequenze più elevate i cambiamenti di paradigma e le perdite legate al cambiamento sono dominanti. Inoltre, molte applicazioni ad alta velocità utilizzano piccoli FET che possono far sì che le perdite di commutazione nel driver FET costituiscano una frazione maggiore delle perdite totali.
In questo articolo vengono analizzate tali perdite, mostrando come la corretta scelta del driver FET può contribuire a mitigarle, in modo da consentire una spinta dell’inviluppo verso un funzionamento a frequenza più elevata.
Meccanismi di perdita
Per migliorare l’efficienza nei progetti ad alta frequenza è necessario comprendere queste tipologie di perdita:
- Perdita nel terzo quadrante/nei tempi morti
- Perdite di recupero inverso del diodo di bootstrap (Qrr)
- Perdite del driver COSS
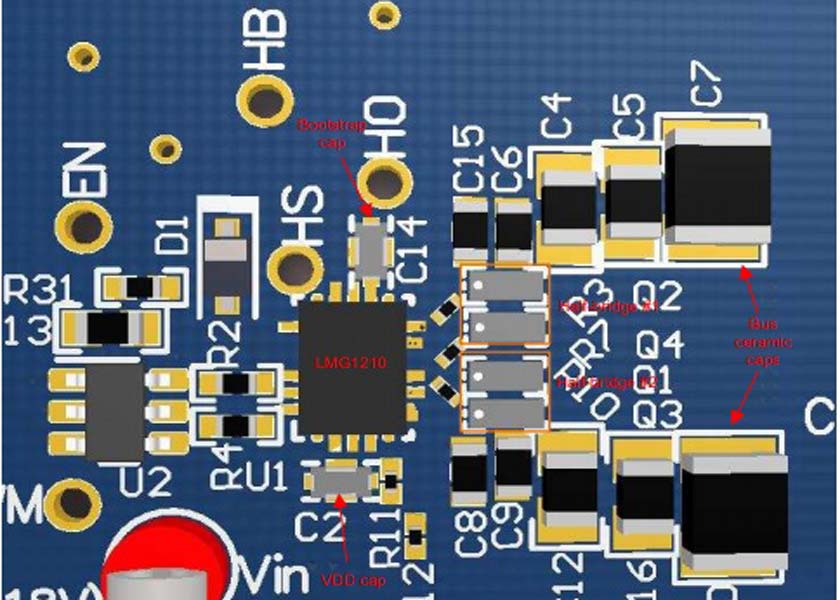
La Figura 1 mostra uno schema di base a mezzo ponte ed evidenzia la posizione del driver COSS e il diodo di bootstrap, che potrebbero soffrire di perdite Qrr. Alcuni driver hanno un bootstrap interno, mentre altri hanno un bootstrap esterno.

Figura 1. Schema a mezzo ponte con la posizione del driver COSS e diodo di bootstrap con Qrr.
Perdite del terzo quadrante
Le perdite del terzo quadrante sono associate alla conduzione della corrente dalla sorgente al drain, mentre il gate FET è low (e il FET è spento). In ogni ciclo di commutazione vi è un breve lasso di tempo in cui entrambi i FET sono disattivati, pertanto la corrente dell’induttore può attraversare uno dei FET nella modalità del terzo quadrante. Ne deriva una perdita direttamente proporzionale alla frequenza, alla corrente e al tempo trascorso come tempo morto.
Nei convertitori operanti ad alte frequenze e basse tensioni di ingresso o di uscita questa perdita può ridurre significativamente l’efficienza. Ad esempio, in un convertitore buck da 12 V a 1,8 V operante a 5 MHz con uscita a 10 A, il passaggio da 1 ns a 10 ns di tempo morto può ridurre l’efficienza dell’8,5%.
Per minimizzare questa perdita, il disallineamento del ritardo di propagazione per low-side e high-side del driver deve essere molto stabile nel corso della variazione da dispositivo a dispositivo, della temperatura, della tensione di bootstrap, della tensione del pin high-side (HS in Figura 1) o dello slew rate HS. Molti di questi effetti non sono misurati nelle schede tecniche.
L’LMG1210 di TI è stato progettato per ridurre al minimo la variazione del ritardo di propagazione. La Tabella 1 mostra un riepilogo dei fattori che causano variazioni del ritardo di propagazione per l’LMG1210 e per la precedente generazione LMG1205. Il notevole miglioramento dei tempi morti dell’LMG1210 si traduce in un miglioramento dell’efficienza.
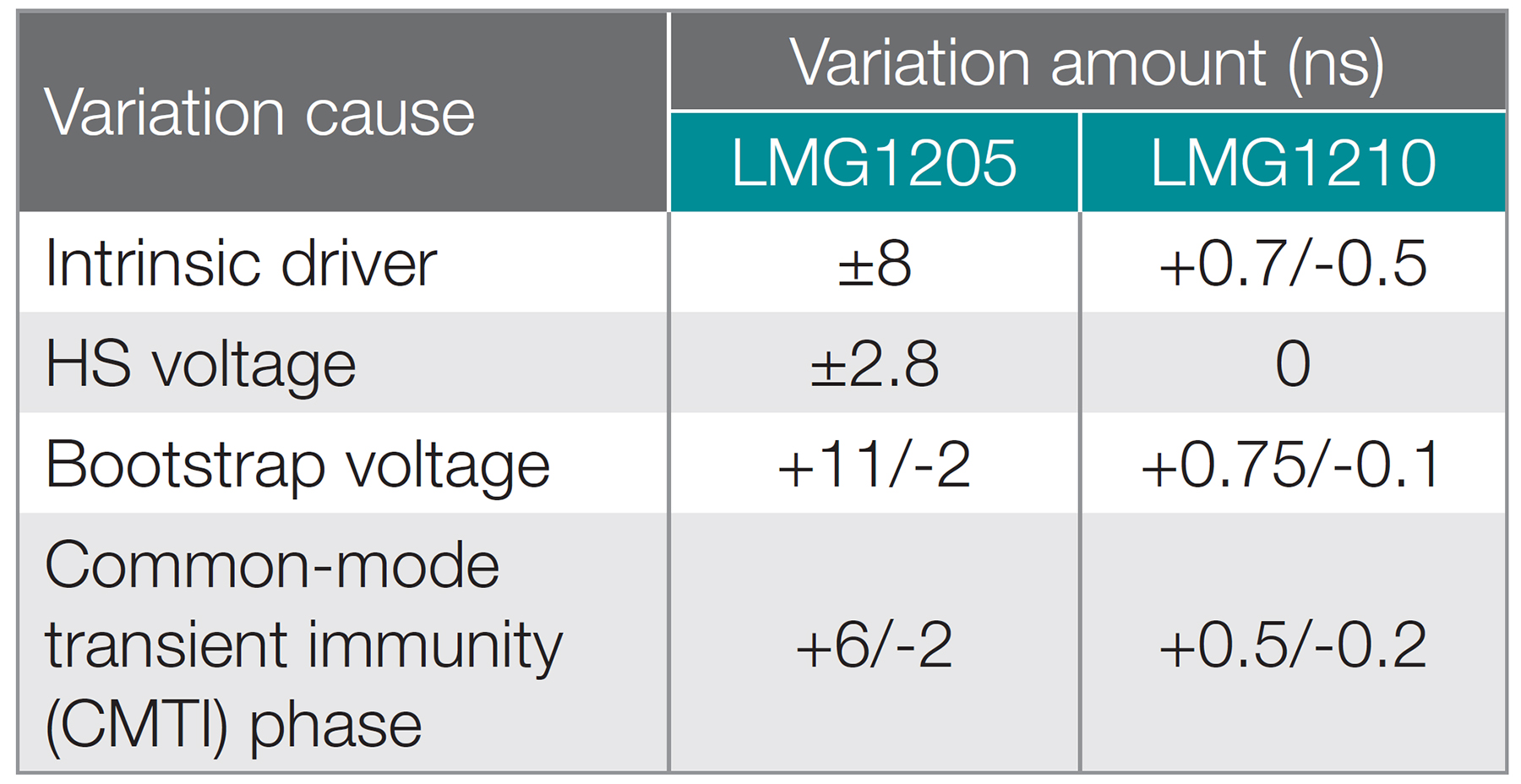
Tabella 1. Cause di tempi morti e loro effetti su due driver.
Perdite di recupero inverso (perdite Qrr)
Il tempo morto non è l’unica perdita che comporta il driver. Sebbene i dispositivi GaN stessi non presentino Qrr, in caso di utilizzo di un diodo di bootstrap il Qrr di quel diodo contribuirà alle perdite. L’utilizzo di uno Schottky o di un terzo piccolo dispositivo GaN come bootstrap sincrono può eliminare questa perdita, se necessario.
In generale, la perdita Qrr di un diodo dipende dal flusso di corrente nel diodo nel lasso di tempo appena prima della sua inversione. Sebbene la corrente media in un diodo di bootstrap possa essere piuttosto bassa, un picco di corrente può attraversare il diodo di bootstrap durante il tempo morto appena prima che la tensione del diodo cambi direzione nei convertitori in cui la corrente esce dal mezzo ponte. Questo aumento di corrente è causato dall’improvvisa caduta di tensione sul nodo di commutazione durante il tempo morto, che pone una caduta di tensione diretta di pari entità attraverso il diodo di bootstrap e crea correnti elevate. L’aumento di corrente provoca una grande perdita Qrr all’inversione del diodo. Generalmente questo effetto non si verifica nei convertitori di tipo boost perché il nodo di commutazione non cade durante il tempo morto.
L’LMG1210 è dotato di un interruttore in serie con il diodo di bootstrap che si attiva un paio di nanosecondi dopo l’accensione del FET low-side e si spegne un paio di nanosecondi prima che il FET low-side si spenga. In pratica, il diodo di bootstrap viene disconnesso durante la parte di tempo morto del ciclo, eliminando così qualsiasi aumento di corrente attraverso il diodo di bootstrap durante il tempo morto e riducendo la perdita Qrr associata. Di conseguenza, la perdita Qrr è ora direttamente proporzionale alla corrente media del diodo di bootstrap, non alla corrente di picco. Questo interruttore di bootstrap ha anche l’effetto di eliminare il sovraccarico del condensatore di tensione di bootstrap.
La Figura 2 mostra una simulazione a livello di transistor dell’LMG1205 con la tensione del nodo di commutazione e la corrente del diodo di bootstrap. Vengono simulati due casi: un normale caso con LMG1205 in cui il diodo di bootstrap è presente durante il tempo morto (mostrato in rosso) e un altro caso in cui il diodo si spegne prima che inizi il tempo morto, che emula l’LMG1210 (mostrato in blu). Se il diodo di bootstrap non viene commutato, la corrente aumenta fino a 1,2 A durante il tempo morto ed è evidente la maggiore corrente di recupero inverso.
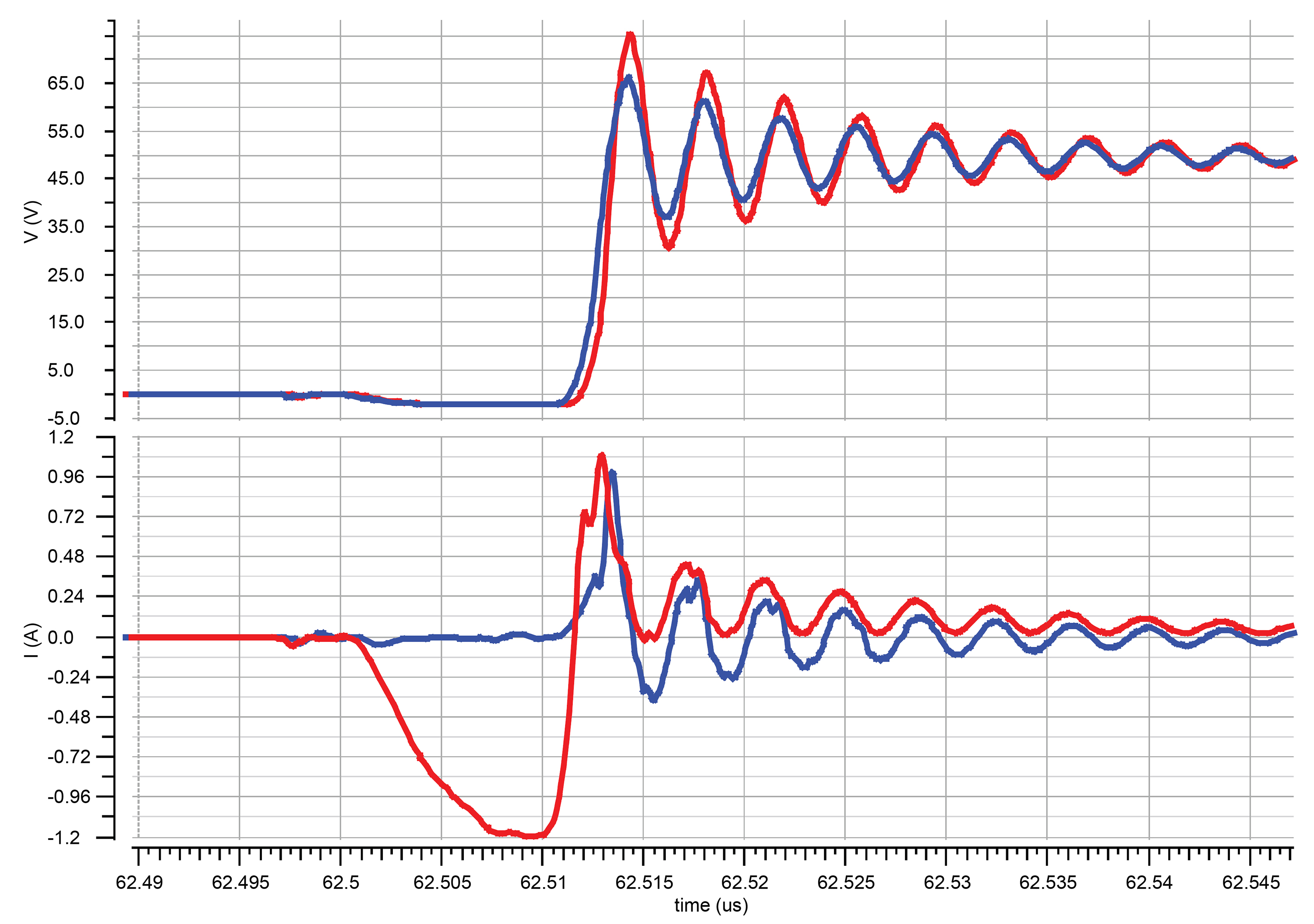
Figura 2. Tensione del nodo di commutazione (in alto) e corrente di bootstrap (in basso). La linea rossa è la risposta dell’LMG1205 che mostra un aumento di corrente appena prima dell’inversione del diodo. La linea blu mostra la risposta dell’LMG1210 in cui il bootstrap si spegne prima del tempo morto.
In questa simulazione, la Qrr è 8nC per ciclo, che viene prelevata dall’alimentazione bus ad alta tensione. Per un convertitore bus da 48 V a 1 MHz, si tratta di una perdita aggiuntiva di 384 mW. Questa perdita è linearmente proporzionale alla frequenza e alla tensione del bus. Inoltre, l’aumento di corrente e la perdita Qrr associata provoca un aumento del ringing del nodo di commutazione.
Per misurare questo effetto al banco è stata configurata una scheda LMG1210 con i FET EPC8010 di EPC come convertitore buck da 12 V a 6 V a 5 MHz testando due diodi di bootstrap: un diodo a giunzione tipo p e tipo n (PN) da 300 V (BAV3004W-7-F di Diodes Inc) e un diodo Schottky da 150 V (BAT46W-7-F di Diodes Inc.). È stato utilizzato un carico di 1,5 A con un tempo morto di 5 ns misurando la perdita di potenza con due configurazioni: una con l’interruttore di bootstrap in funzionamento normale e l’altra con l’interruttore di bootstrap in cortocircuito, per emulare le prestazioni dell’LMG1205. La Tabella 2 elenca i risultati.
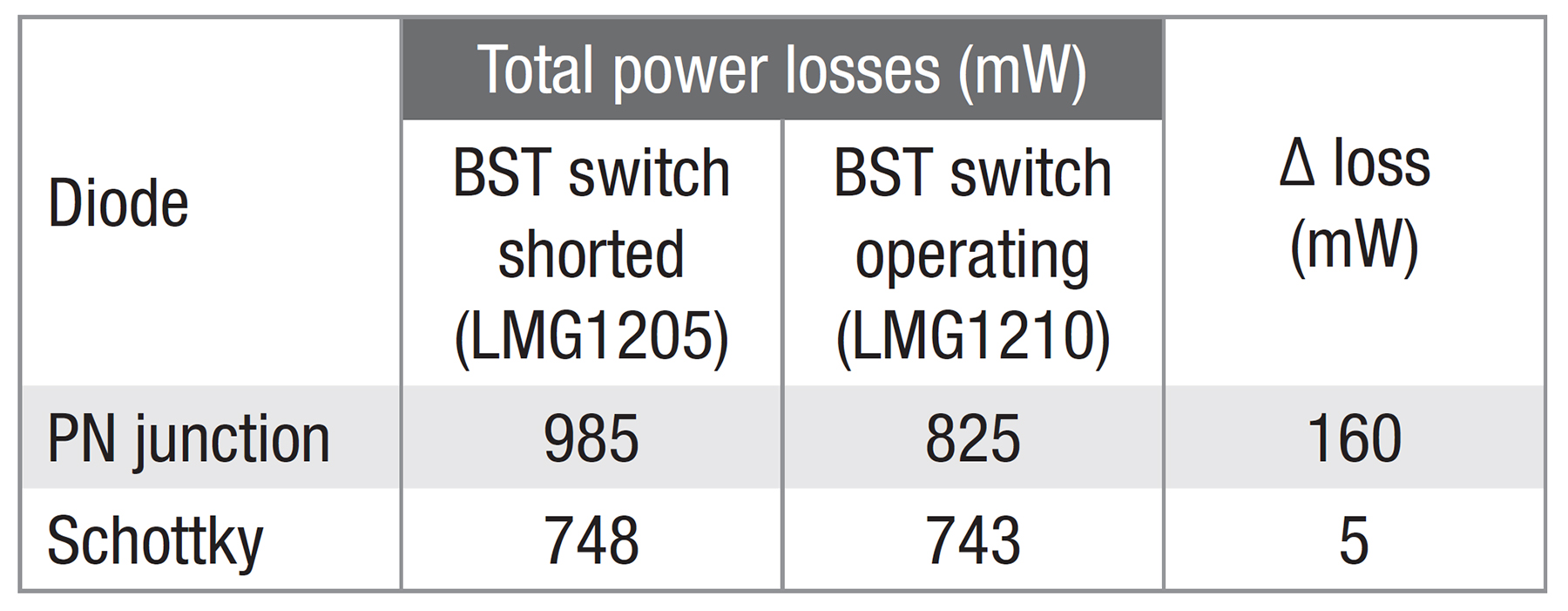
Tabella 2. Perdite totali con diverse configurazioni di diodi.
La differenza di perdita tra il diodo Schottky e il diodo a giunzione PN può essere causata dalla maggiore tensione di bootstrap quando si utilizza il diodo Schottky (a causa della caduta di tensione diretta dello Schottky) e dalla riduzione della Qrr. Come si può notare, il diodo a giunzione PN trae maggior beneficio dallo spegnimento del diodo di bootstrap poco prima del tempo morto perché soffre maggiormente di perdite Qrr. Non corrisponde alla simulazione precedente perché le caratteristiche del diodo e le condizioni operative sono diverse.
L’LMG1205 presenta un diodo a giunzione PN interno, pertanto non è possibile utilizzare uno Schottky esterno per migliorare le prestazioni senza bypassare anche il blocco di tensione del bootstrap interno. L’LMG1210 con il suo interruttore di bootstrap può utilizzare un diodo di giunzione PN più economico con capacità inferiore e ottenere comunque buone perdite Qrr oppure un diodo Schottky per ridurre ulteriormente le perdite.
Effetti della QOSS
I driver a mezzo ponte hanno una capacità intrinseca dal driver high-side alla terra low-side. L’LMG1210 presenta un’architettura migliorata che riduce questa capacità. Inoltre, tutti i driver hanno la capacità del diodo di bootstrap. Il diodo LMG1205 è interno e misurato come parte del driver QOSS, ma per l’LMG1210 il diodo è esterno.
La Figura 3 mostra la capacità di isolamento del vecchio LMG1205 e del più recente LMG1210, mostrando la grande differenza tra le due generazioni di driver. Tuttavia, occorre tenere presente che l’LMG1210 richiede un diodo di bootstrap esterno, che si somma al suo totale. La QOSS provoca ulteriori perdite, che verranno descritte nella prossima sezione.
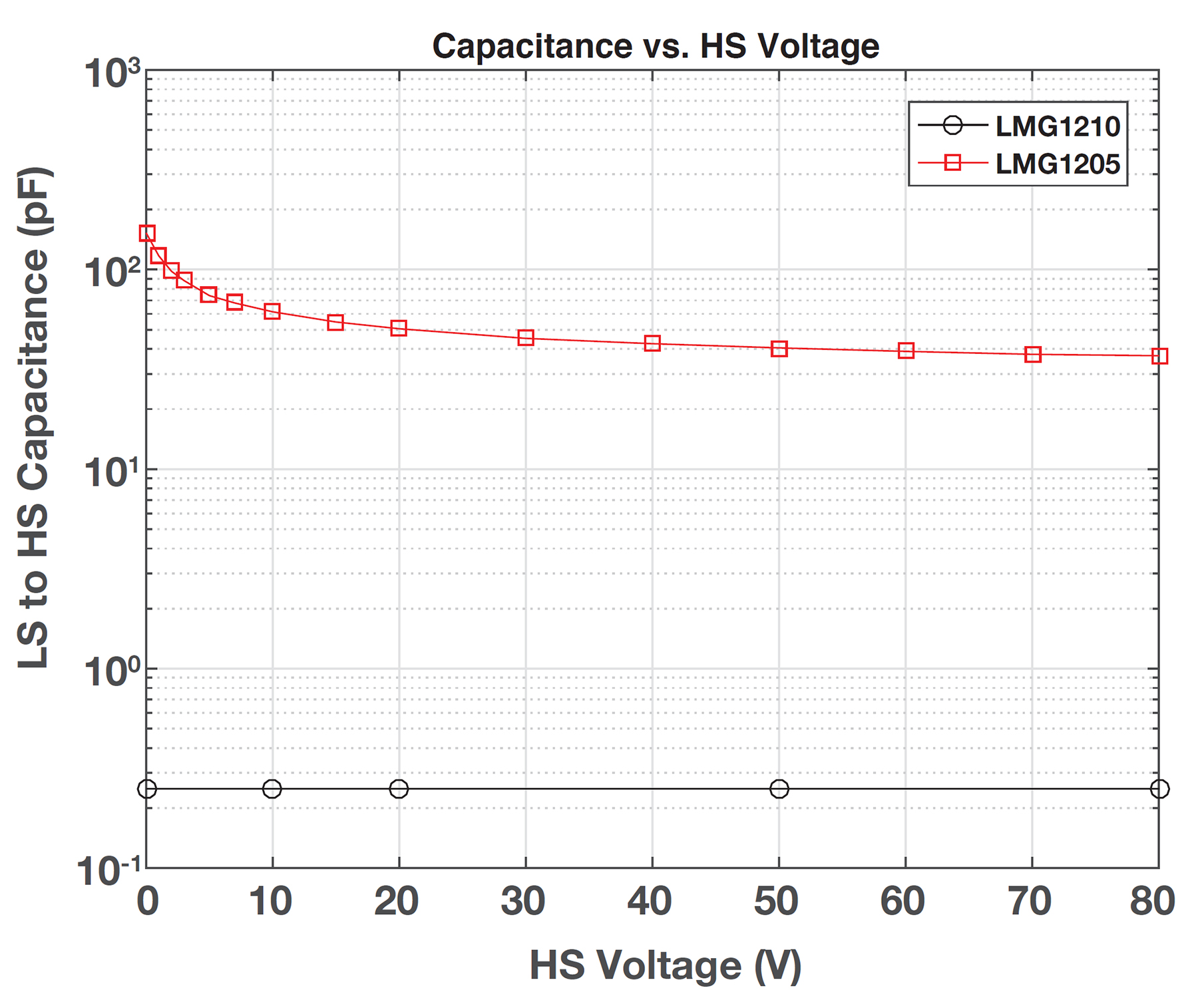
Figura 3. Capacità da high-side a low-side rispetto alla tensione
Perdite di carica/scarica QOSS
Nei convertitori ad hard-switching la carica in uscita viene dissipata nel FET ad ogni transizione di accensione. Questa perdita è proporzionale alla QOSS, alla tensione del bus ed alla frequenza di commutazione. I FET in GaN presentano una QOSS significativamente inferiore rispetto a quelli in silicio, riducendo la perdita di carica in uscita per ogni ciclo e consentendo quindi frequenze più elevate.
La QOSS totale è la somma della QOSS dei FET, del driver, del diodo di bootstrap e della capacità parassita della scheda. Con la tecnologia in silicio, le perdite QOSS erano dominate dal FET in silicio, pertanto non era necessario prestare attenzione ai contributi del driver del gate. Quando si utilizzano piccoli FET in GaN (come la serie EPC EPC8000 con meno di 1nC di QOSS), il driver del gate può contribuire a una parte significativa di queste perdite. La Tabella 3 mostra la QOSS da 0 V a 48 V per i due driver, che è semplicemente la Figura 3 integrata con 0 V-48 V.
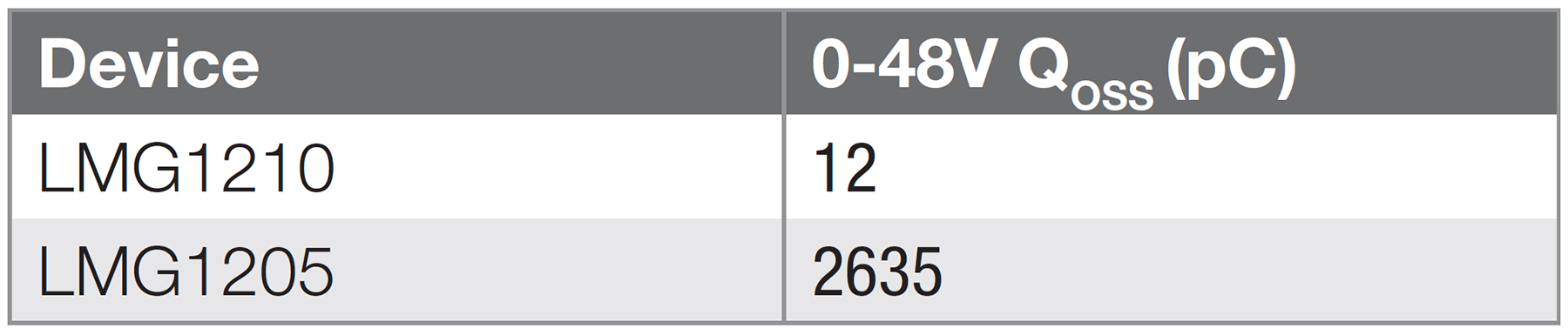
Tabella 3. 0V-48V QOSS per i due dispositivi
Occorre tenere presente che, per essere paragonabile all’LMG1205, potrebbe essere necessario aggiungere la carica di uscita del diodo di bootstrap esterno all’LMG1210. I diodi a bassa capacità raccomandati possono aggiungere 250-800pC o più al totale per l’LMG1210, con diodi a giunzione solitamente posti all’estremità inferiore e diodi Schottky all’estremità superiore.
In una determinata applicazione, si può provare a valutare il rapporto tra il driver combinato e la QOSS di bootstrap rispetto alla QOSS del FET. Mantenere il più basso possibile questo rapporto consente di ottenere tutti i vantaggi del GaN. Per l’LMG1210, la capacità intrinseca del driver è molto più bassa della capacità parassita della scheda e della capacità del diodo di bootstrap, pertanto è qui che deve avvenire l’ottimizzazione.
Conclusione
Una serie di meccanismi di perdita, solitamente ignorati dai progettisti per applicazioni fino a poche centinaia di kilohertz, diventano estremamente importanti per le nuove applicazioni che operano con GaN a svariati megahertz. Texas Instruments ha presentato una nuova generazione di gate driver che affronta tali meccanismi di perdita e consente uno sviluppo preciso di questa nuova tecnologia. L’LMG1210 permette di realizzare progetti ottimizzati fino a 50 MHz, lasciando spazio per lo sviluppo di future applicazioni con FET in GaN.
A cura di Nathan Schemm, Design Engineer, Circuiti integrati a segnale misto, Prodotti GaN, Texas Instruments.
Bibliografia:
Nathan Schemm. “Optimizing Efficiency Through Dead Time Control With the LMG1210 GaN Driver.” Texas Instruments Application Note, SNVA815, February 2018.