Non ci sono prodotti a carrello.
I sistemi elettrici automobilistici continuano ad aumentare di complessità, con un numero sempre maggiore di centraline elettroniche (ECU) implementate nei veicoli. Queste ECU condividono dati in tempo reale su un livello molto più ampio, aumentando quindi la richiesta di larghezza di banda della rete.
Per risolvere il problema della larghezza di banda, le aziende automobilistiche hanno collaborato con i principali produttori di circuiti integrati e con gli sviluppatori di sistemi per stabilire uno standard Ethernet completamente nuovo, su misura per le reti di comunicazione in campo automobilistico.
Lo standard 802.3bw dell’IEEE (Institute of Electrical and Electronic Engineers), noto anche come 100BASE-T1, precedentemente noto come BroadR-Reach, è uno standard Ethernet a 100 Mbps destinato ad aumentare il throughput dei dati, soddisfare i severi standard automobilistici per le emissioni e ridurre il peso e il costo dei cablaggi nelle reti automobilistiche. Utilizzando i principi di base della sovrapposizione e gli schemi specifici di codifica e scrambling, il 100BASE-T1 riduce le interferenze elettromagnetiche (EMI), il peso del cablaggio, i costi e le dimensioni di ingombro rispetto agli standard Ethernet 10BASE-T e 100BASE-TX.
Nel corso degli anni, i sistemi elettrici automobilistici sono diventati più complessi, principalmente sulla spinta dei progressi nell’infotainment, nei sistemi avanzati di assistenza alla guida (ADAS), nelle catene cinematiche e nell’elettronica della carrozzeria. Questi sistemi richiedono reti di comunicazione più veloci a causa della grande quantità di dati in tempo reale e di firmware/software condivisi tra varie centraline elettroniche (ECU) nei veicoli odierni.
L’IEEE 802.3bw (100BASE-T1) è un nuovo protocollo di comunicazione a livello fisico (PHY) sviluppato dalle aziende automobilistiche insieme ai principali produttori di circuiti integrati e agli sviluppatori di sistemi. 100BASE-T1 è una soluzione praticabile per maggiori esigenze di larghezza di banda con velocità di comunicazione di 100 Mbps su un cavo a singolo doppino ritorto non schermato. Utilizzando tecniche come la sovrapposizione, la codifica e gli schemi di scrambling (insieme a pochi componenti passivi), il 100BASE-T1 riduce le interferenze elettromagnetiche (EMI), il peso del cablaggio, i costi e le dimensioni di ingombro rispetto alle soluzioni Fast Ethernet (100BASETX) tradizionali. L’obiettivo di questo articolo è esaminare i possibili casi d’uso del 100BASE-T1 nei sistemi automobilistici sulla base delle tipologie di dati nelle reti automobilistiche ed illustrare in che modo il livello fisico crea una rete qualificata per il settore automobilistico rispetto agli standard Ethernet precedenti.
Ethernet nel settore automobilistico
Sebbene l’Ethernet sia un protocollo di comunicazione dalla popolarità di lunga data per applicazioni commerciali e industriali, non ha vissuto un’ampia adozione da parte dell’industria automobilistica fino all’avvento del 100BASE-T1. Alcuni veicoli utilizzano ancora il 100BASE-TX per gli strumenti diagnostici di bordo (OBD). Tuttavia, il 100BASE-TX non è stato in grado di crescere all’interno dell’ecosistema automobilistico in quanto richiede due cavi a doppino ritorto e non soddisfa i severi limiti per le emissioni irradiate di Classe 5 del Comité international spécial des perturbations radioélectriques (CISPR) 25 [1].
Il 100BASE-T1 è stato sviluppato per soddisfare le esigenze di un sistema automobilistico e richiede soltanto un cavo a doppino ritorto non schermato per trasmettere e ricevere dati alla velocità di 100 Mbps su distanze di comunicazione di almeno 15 m. Il profilo di emissione 100BASE-T1 è conforme al metodo stripline CISPR 25 Classe 5 Allegato G e ad altri standard di emissione automobilistici come il TC8 di Open Alliance [1], [2], [3]. Il 100BASE-T1 standardizza l’ecosistema di bordo in un’architettura di rete, semplificando la comunicazione generale tra le ECU ed eventualmente eliminando la necessità di protocolli meno recenti o meno diffusi come Media Oriented Systems Transport (MOST) o FlexRay.
Il 100BASE-T1 è in grado di abilitare la comunicazione di dati audio, video, connected car, firmware/software e dati di calibrazione all’interno di veicoli utilizzando la raccolta AVB (Audio Video Bridging) di protocolli Ethernet su cavo a singolo doppino ritorto non schermato. La raccolta di standard AVB, sviluppata dal Time-Sensitive Networking Task Group dell’IEEE, presenta latenza ridotta e deterministica, nodi sincronizzati e shaping del traffico [1], [4]. Questi aspetti sono importanti per comunicare le varie tipologie di informazioni nei sistemi automobilistici e consentire al 100BASE-T1 di trasportare diverse tipologie di dati con varie priorità (bassa velocità di trasmissione dati e alta priorità oppure velocità elevata e bassa priorità, nonché sincronizzazione temporale).
Ethernet per dati audio e video
Il 100BASE-T1 in combinazione con AVB può trasmettere sia dati audio che video, aprendo quindi opportunità per l’Ethernet nel campo dell’infotainment e degli ADAS. AVB assegna una certa quantità di larghezza di banda solo per i dati audio e video. La quantità di larghezza di banda partizionata è regolabile a scelta dal produttore dell’apparecchiatura originale (OEM). In genere, 75 Mbps di larghezza di banda sono allocati per flussi audio e video, mentre i restanti 25 Mbps sono assegnati ai flussi di dati [4].
La Tabella 1 mostra la larghezza di banda necessaria per l’audio in base alla frequenza di campionamento e alla profondità in bit per due canali utilizzando l’Equazione 1:
Bit rate=Frequenza di campionamento × Profondità bit × Numero di canali (1)
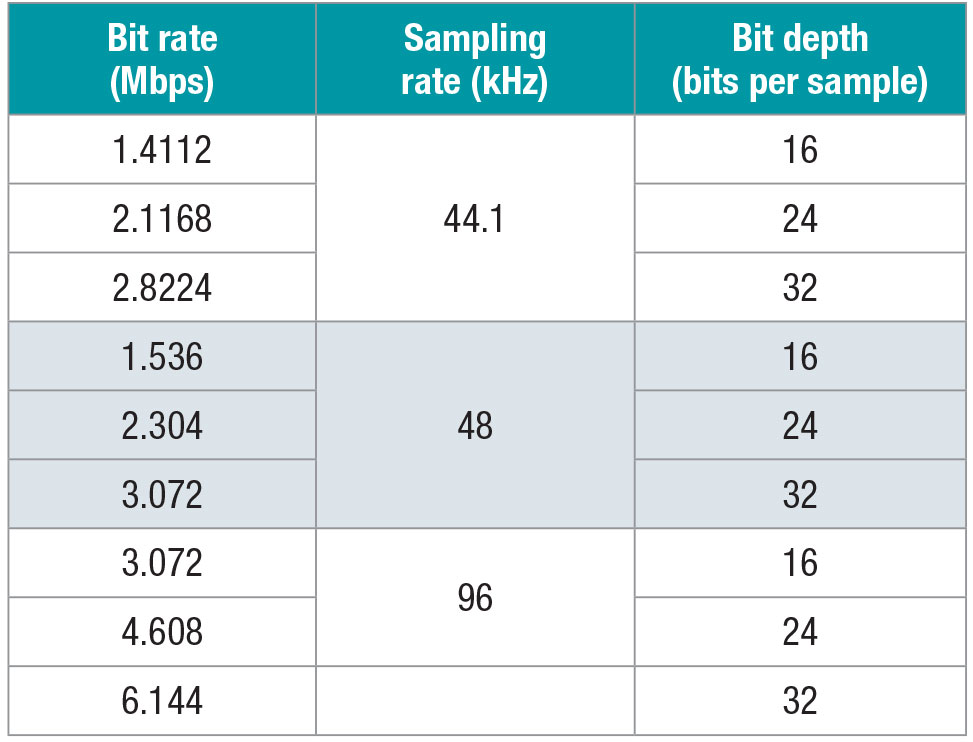
Tabella 1. Larghezza di banda audio per due canali.
In base alla Tabella 1, il 100BASE-T1 risponde facilmente ai requisiti di larghezza di banda per audio a 44,1 kHz, 48 kHz e persino a 96 kHz campionati con profondità in bit fino a 32 campione. Ad esempio, un tipico CD viene campionato a 44,1 kHz e ha una profondità in bit di 16 bit per campione, mentre l’audio ad alta risoluzione viene spesso campionato a 96 kHz con una profondità in bit di 24 bit per campione: entrambi sono completamente supportati dai collegamenti con 100BASE-T1.
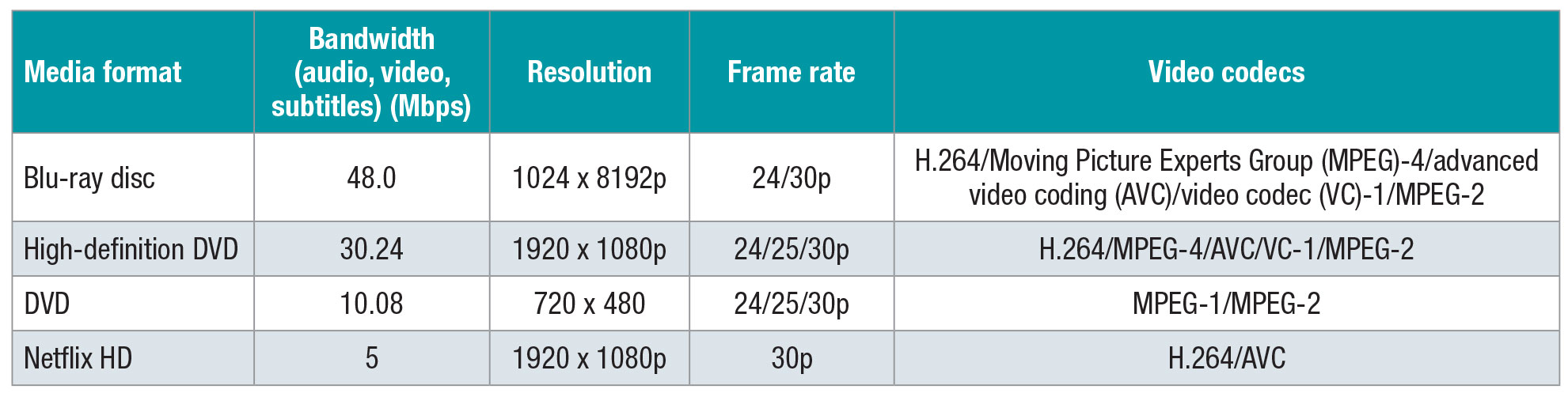
Tabella 2. Larghezza di banda video [5], [6], [7].
D’altra parte, la trasmissione video richiede molta più larghezza di banda. La Tabella 2 mostra diversi formati video con i rispettivi requisiti di larghezza di banda. La Tabella 2 stima inoltre la quantità di larghezza di banda video necessaria per diversi formati multimediali, risoluzioni e frame rate.
Sulla base dei dati nella Tabella 2, l’ampiezza di banda di 75 Mbps di AVB abbinata al 100BASE-T1 dovrebbe essere in grado di gestire una coppia di canali video nel campo dell’infotainment. Tuttavia, nelle applicazioni ADAS, i dati video non compressi provenienti dalle telecamere possono presentare facilmente requisiti di larghezza di banda superiori a 1 Gbps [8]. A meno che il video non venga compresso prima della trasmissione, il 100BASE-T1 potrebbe non essere idoneo allo scopo. Inoltre, i video trasmessi via Ethernet richiedono un microcontroller (MCU) sia per eseguire la compressione video sia per fornire un layer MAC (Media Access Control) per le comunicazioni Ethernet. Poiché le telecamere trasmettono anche molti gigabit di dati non compressi al dispositivo di elaborazione principale, il 100BASE-T1 non rappresenta la soluzione giusta. Tuttavia, il 100BASE-T1 costituisce un’opzione valida per le comunicazioni video quando si integra una MCU all’interno di una telecamera (come una telecamera di backup intelligente).
Applicazioni connected car
Il 100BASE-T1 non si limita alle applicazioni AVB. Una connessione fondamentale all’interno del veicolo è l’unità di controllo telematica (TCU), che controlla il monitoraggio wireless e la comunicazione da e verso il veicolo. La comunicazione dalla TCU al gateway automobilistico (che collega tra loro vari ambiti di comunicazione di un veicolo; vedere la Figura 1) consente l’accesso al cloud, facilitando gli aggiornamenti software/firmware via etere per varie ECU.
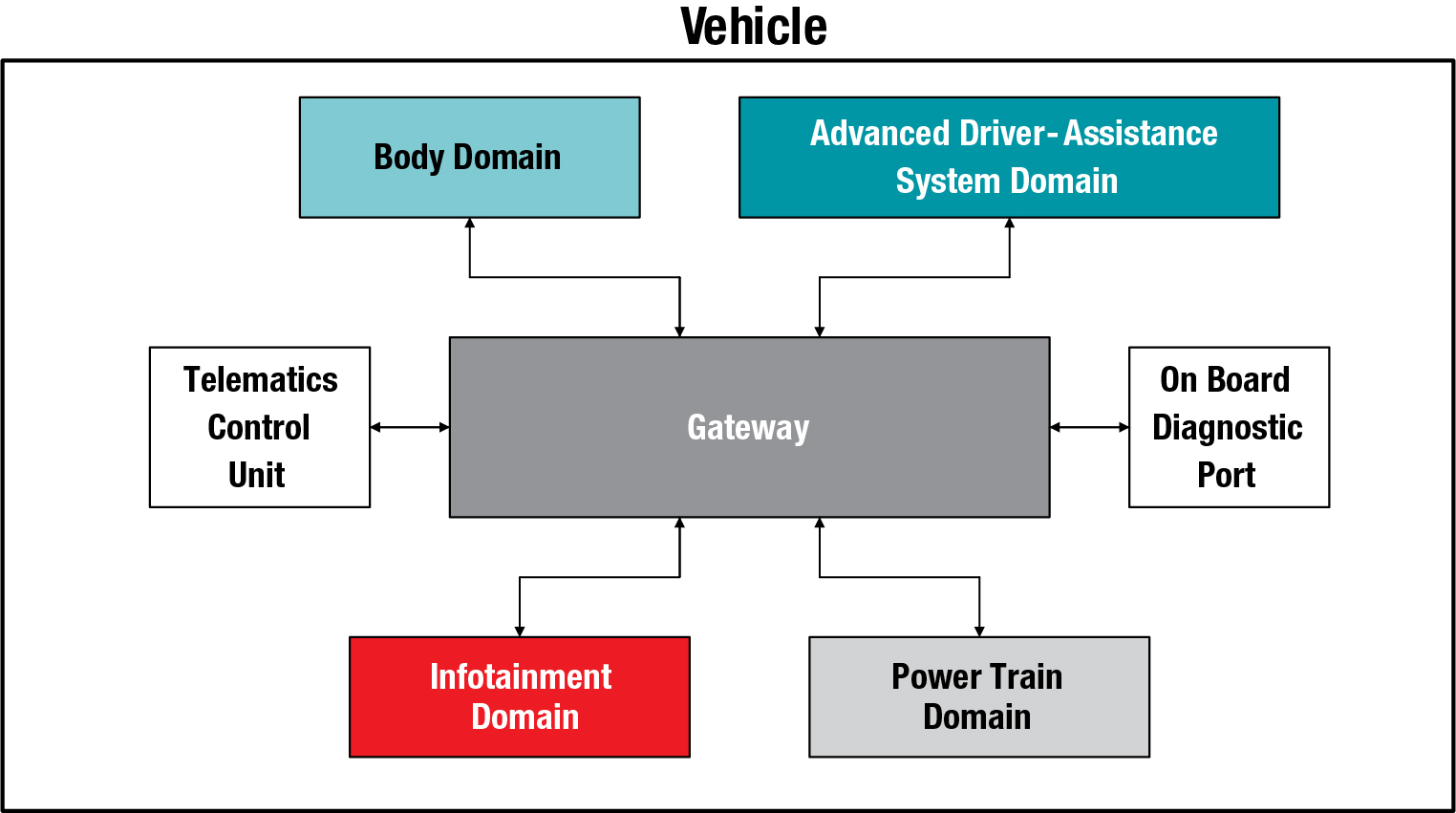
Figura 1. Schema a blocchi del gateway.
Un fattore importante da considerare per il 100BASE-T1 è che alcuni modem LTE (4G Long-Term Evolution) automobilistici implementati nella TCU possono funzionare a 300-400 Mbps, motivo per cui è inevitabile adottare soluzioni 1000BASE-T1 e multigigabit.
Firmware/software e dati di calibrazione
Gli aggiornamenti firmware e software e la calibrazione sono più veloci quando si utilizza Ethernet 100BASE-T1, riducendo i tempi di fermo per gli aggiornamenti dei veicoli. La maggior parte dei veicoli dispone di una porta OBD 100BASE-TX per la lettura dei dati diagnostici e l’aggiornamento o il flashing del software/firmware. Collegando varie ECU in un veicolo tramite 100BASE-T1 a un gateway centrale con una porta OBD, gli aggiornamenti possono essere eseguiti più rapidamente rispetto alle attuali soluzioni con vari bus di comunicazione; il Controller Area Network (CAN) funziona a 1 Mbps, il CAN Flexible Data-Rate (CAN-FD) funziona a più di 2 Mbps e il FlexRay opera a 10 Mbps [1], [4].
Il 100BASE-T1 può inoltre facilitare la calibrazione di una ECU in prossimità del completamento della produzione. L’utilizzo di Ethernet 100BASE-T1 per la trasmissione dei dati consente di ridurre i tempi di calibrazione, riducendo il tempo di produzione complessivo.
Nozioni di base per 100BASE-T1 PHY
Nel paragrafo «Ethernet nel settore automobilistico» sono stati illustrati i vantaggi del 100BASE-T1 e le tipologie di dati che vengono tipicamente trasferite in una rete automobilistica. Il paragrafo successivo tratterà approfonditamente il 100BASE-T1 dalla prospettiva PHY, chiarendo come il 100BASE-T1 soddisfi i requisiti del sistema automobilistico per basse EMI, basso costo, peso ridotto del cablaggio e maggiore larghezza di banda.
Metodo di codifica 100BASE-T1 per riduzione delle EMI a velocità di 100 Mbps
Il 100BASE-T1 opera con un esclusivo schema di codifica 4-bit to 3-bit (4B3B), 3-bit to 2-ternary (3B2T) ed a modulazione di ampiezza degli impulsi a tre livelli (PAM3) per ottenere emissioni ridotte rispetto al Fast Ethernet. Un PHY 100BASE-T1 esegue tutte le operazioni di scrambling e codifica necessarie prima della trasmissione attraverso il cavo a singolo doppino ritorto non schermato. Il 100BASE-T1 è trasparente da un MAC in quanto la Media Independent Interface (MII) esistente non è cambiata. Al momento sono disponibili quattro xMII principali per 100BASE-T1:
- MII:
- Interfaccia dati a 4 bit di larghezza
- Controlli di ricezione e trasmissione
- Clock di ricezione e trasmissione
- Reduced Media Independent Interface (RMII):
- Interfaccia dati a 2 bit di larghezza
- Controlli di ricezione e trasmissione
- Riferimento clock singolo
- Reduced Gigabit Media Independent Interface (RGMII):
- Interfaccia dati a 4 bit di larghezza
- Controlli di ricezione e trasmissione
- Clock di ricezione e trasmissione
- Serial Gigabit Media Independent Interface (SGMII):
- percorso di ricezione a 2 pin Low-Voltage Differential Signaling (LVDS)
- percorso di trasmissione a 2 pin LVDS
La Figura 2 mostra la segnalazione di un MAC e PHY a seconda dell’interfaccia. Dopo aver ricevuto i dati dal MAC, Ethernet PHY esegue la codifica, lo scrambling e la serializzazione dei dati [5]. Questi processi preparano i dati per il front-end analogico del PHY, che trasmette quindi i dati sul cavo a singolo doppino ritorto non schermato a un partner di collegamento.
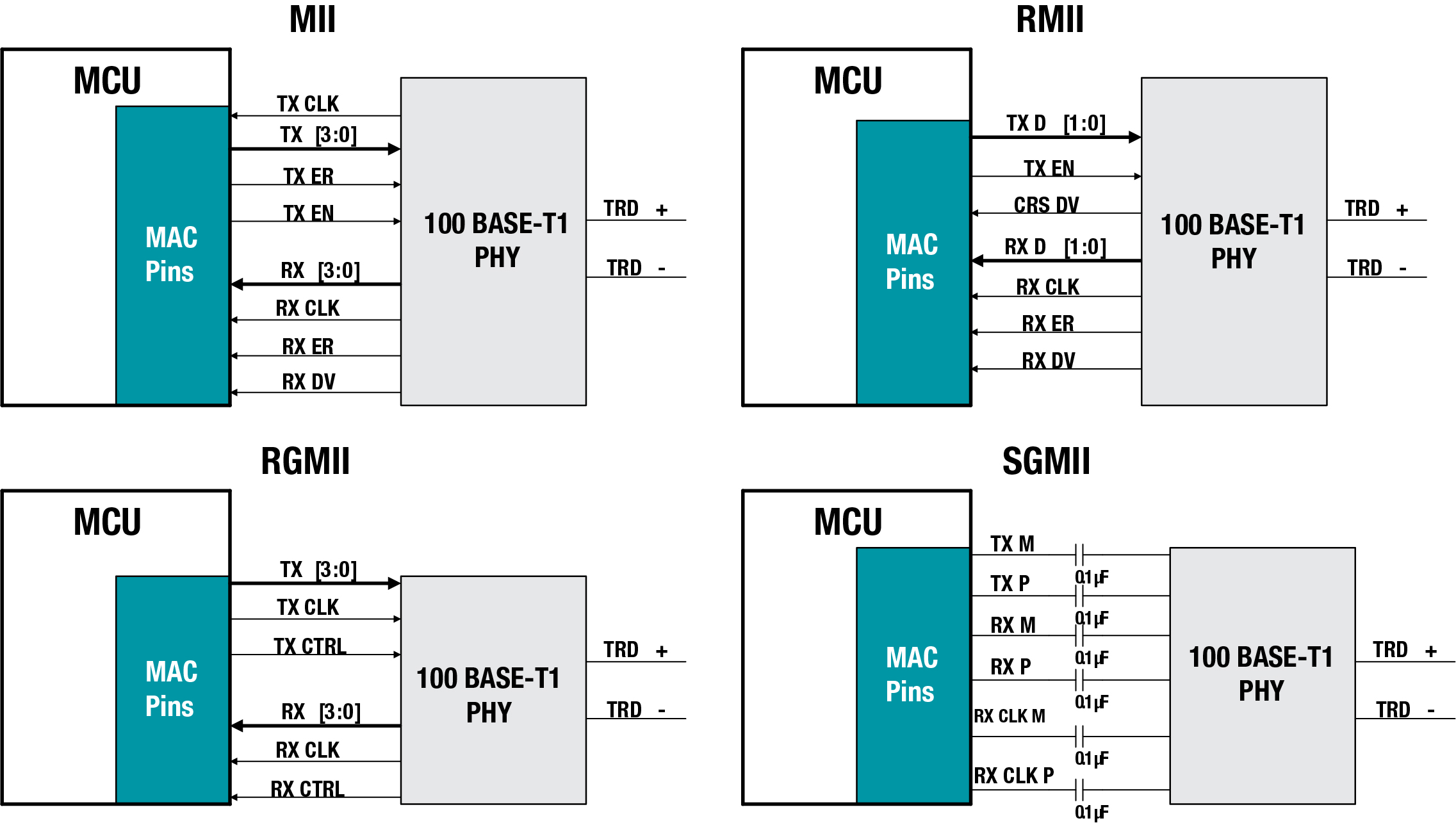
Figura 2. Vari MII.
Ad esempio, un PHY 100BASE-T1 che comunica con un MAC tramite RGMII riceverà quattro bit paralleli con clock a 25 MHz (100 Mbps in totale). Il PHY converte questi quattro bit in tre bit e aumenta la frequenza di clock a 33 1/3 MHz per mantenere la velocità in bit di 100 Mbps (se un frame non è divisibile per tre, il PHY aggiunge bit di riempimento per abilitare la conversione corretta; il partner di collegamento rimuove questi bit di riempimento prima di trasferirli al MAC). Usando ciascun gruppo di tre bit, una coppia ternaria (2T) viene generata dal PHY in base alla mappa dei simboli mostrata nella Tabella 3. Infine, il vettore della coppia ternaria (TA, TB) viene trasmesso utilizzando la modulazione di ampiezza dell’impulso a tre livelli (PAM3) a una frequenza fondamentale di 66 2/3 MHz. La Figura 3 mostra i dati convertiti da MII alla Medium Dependent Interface (MDI) attraverso il PHY. Osservando il segnale PAM3, è facile notare come ogni periodo di 33 1/3 MHz rappresenti tre bit di dati e quindi trasferisca i dati a 100 Mbps. Questo segnale viene inviato utilizzando tre livelli di tensione (+1 V, 0 V e -1 V) con meno di 2,2 V da picco a picco (se misurati con terminazione differenziale 100 Ω) [9]. Il PAM3 viene trasmesso sull’MDI, che include il connettore per il cavo e il cavo a singolo doppino ritorto stesso, nonché tutti i componenti passivi esterni utilizzati per il filtraggio passa-basso aggiuntivo e la reiezione in modalità comune (CM). Il connettore MDI e la combinazione di cavi a singolo doppino ritorto non schermato devono soddisfare specifiche elettriche quali l’attenuazione di riflessione, la perdita per conversione e la tolleranza ai guasti, come specificato nella Sezione 96.8 della specifica MDI dello standard 100BASE-T1.
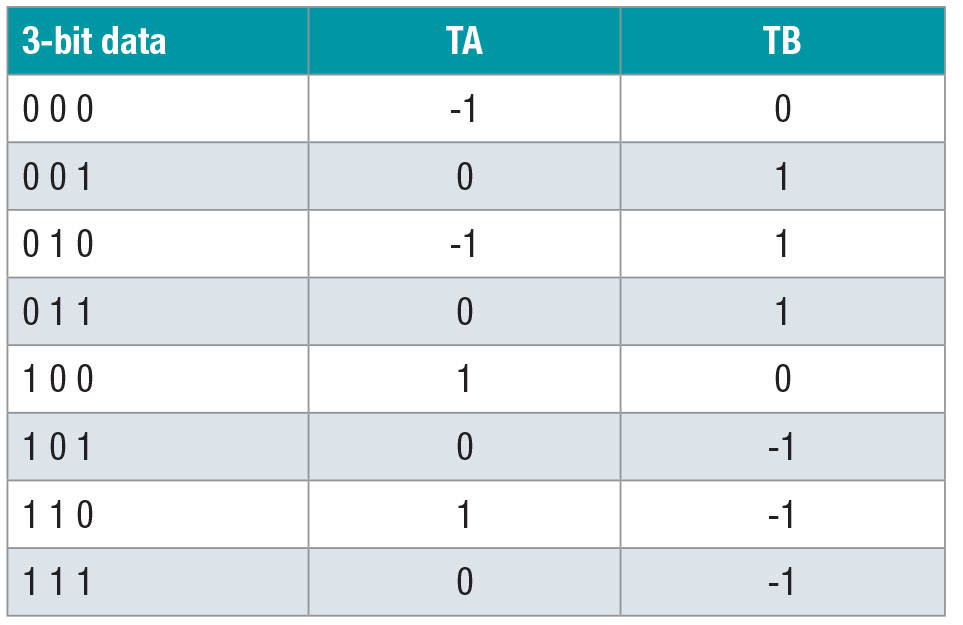
Tabella 3. Mappatura dei simboli di inattività 100BASE-T1 [9].
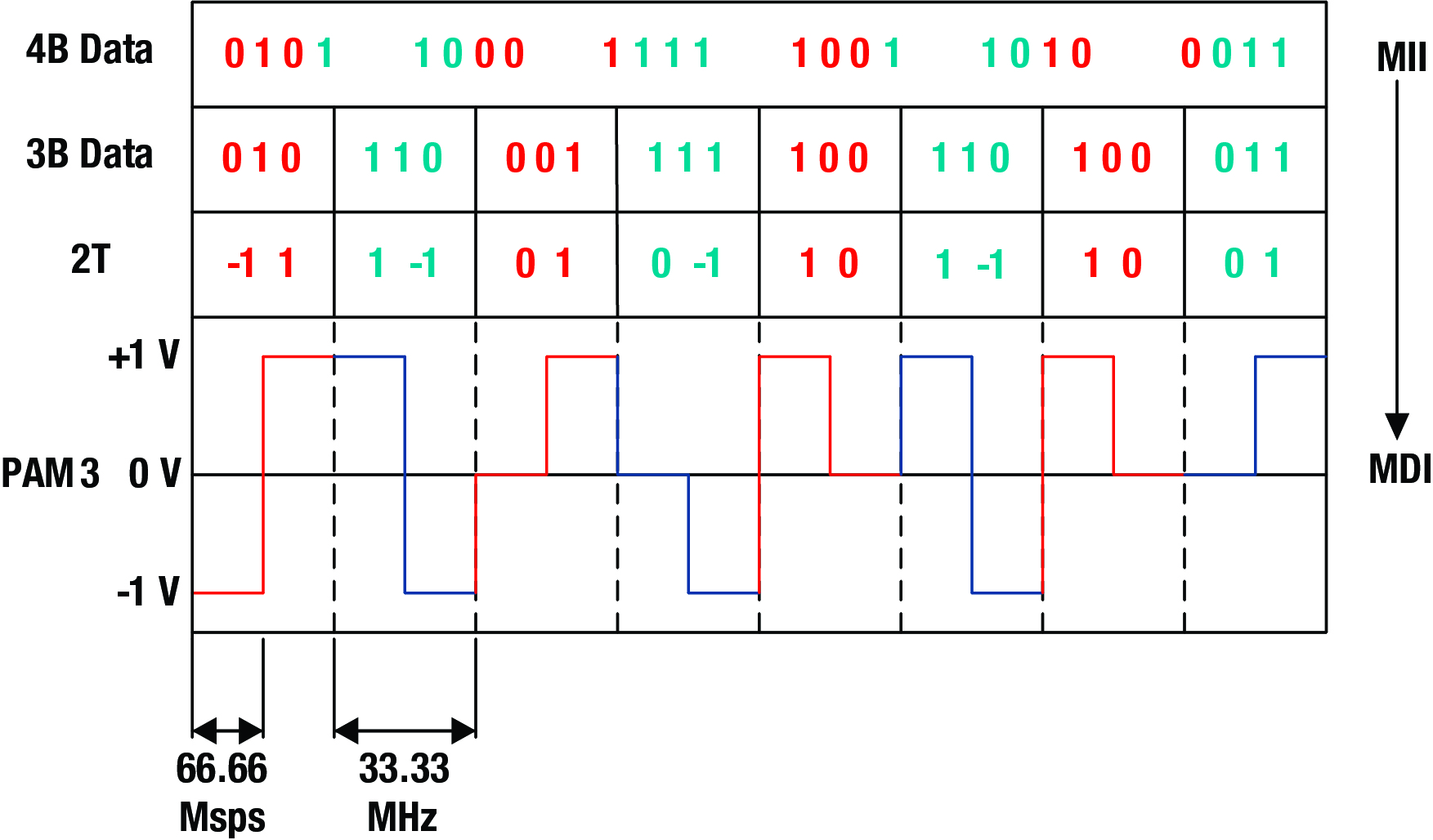
Figura 3. Conversione di dati GPHY da MII a MDI [10].
I protocolli Ethernet hanno specifiche differenti per lo scrambling, la serializzazione e la codifica dei dati in base alla loro applicazione di destinazione. Per confronto, il 100BASE-TX trasmette i dati a 125 MHz utilizzando il Multi-Level Transmit (MLT-3). La frequenza fondamentale è superiore a quella del 100BASE-T1 (66 2/3 MHz) e richiede un doppino ritorto dedicato per la trasmissione e la ricezione. Il 100BASE-T1 richiede solo circa 33,3 MHz di larghezza di banda, quasi la metà del 100BASE-TX. In pratica, è possibile utilizzare un cavo di qualità inferiore (riduzione dei costi) offrendo al contempo un filtraggio migliore per migliorare emissioni e immunità, entrambi fondamentali nelle applicazioni automobilistiche. Inoltre, l’efficienza spettrale aumenta quando si utilizza il metodo di 100BASE-T1 di mappatura del segnale 3B2T e la modulazione PAM3 sulla codifica 4B5B di 100BASE-TX in MLT-3, diminuendo quindi le emissioni attraverso la riduzione della larghezza di banda necessaria per inviare la stessa quantità di dati.
Trasmissione/ricezione dei dati su un singolo doppino ritorto non schermato
Il 100BASE-T1 è un’interfaccia fisica full duplex che consente la trasmissione e la ricezione sullo stesso doppino, a differenza di 10BASE-T e 100BASE-TX, dove trasmissione e ricezione avvengono su doppini dedicati. I supporti condivisi riducono il peso complessivo dei cavi nel veicolo, riducendo non soltanto il costo del materiale, ma migliorando anche l’efficienza del carburante. Il full duplex fisico è realizzato attraverso i principi di sovrapposizione. I PHY 100BASE-T1 presentano ibridi integrati e utilizzano la cancellazione dell’eco per rimuovere il proprio segnale trasmesso ed estrarre le informazioni ricevute da un partner di collegamento. A tal fine, un PHY funge da master e l’altro da slave. Quando due PHY 100BASE-T1 si connettono, subiscono un processo di addestramento che porta sia il dispositivo in prova (DUT, Device Under Test) che il partner di collegamento a trasmettere informazioni alla stessa frequenza e con la stessa fase. La Figura 4 mostra uno schema a blocchi semplificato di cancellazione ibrida e dell’eco all’interno di ciascun PHY.
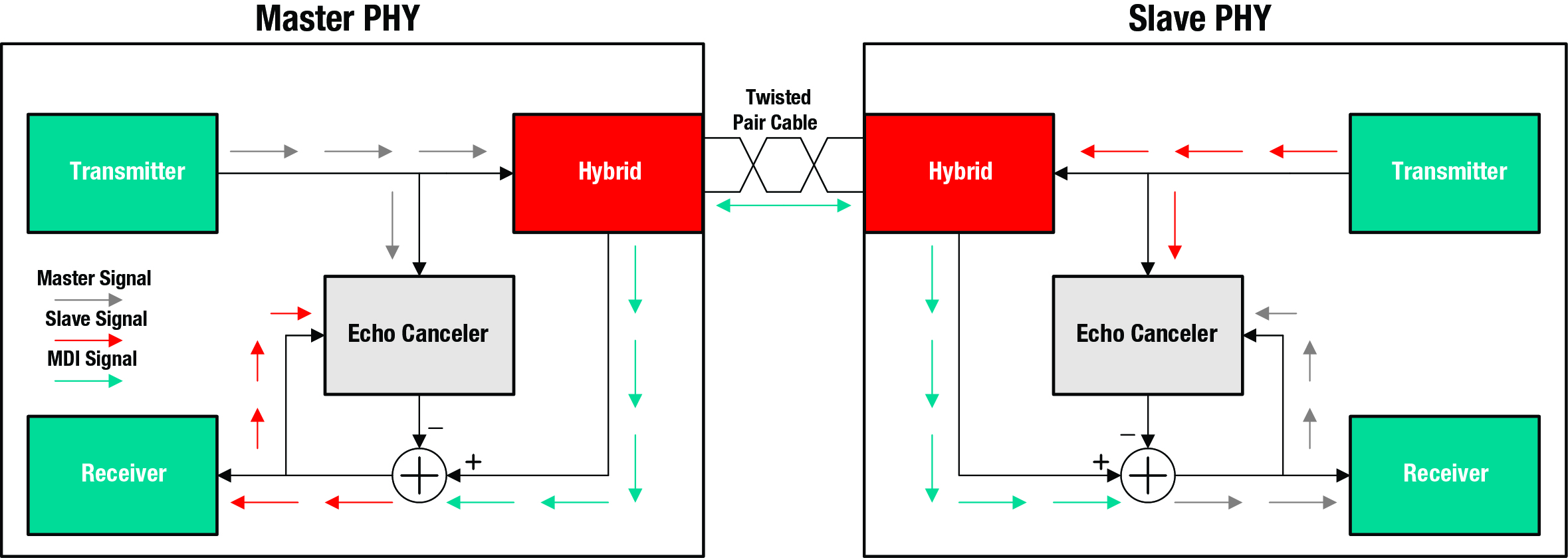
Figura 4. Cancellazione dell’eco e schema a blocchi ibridi [11].
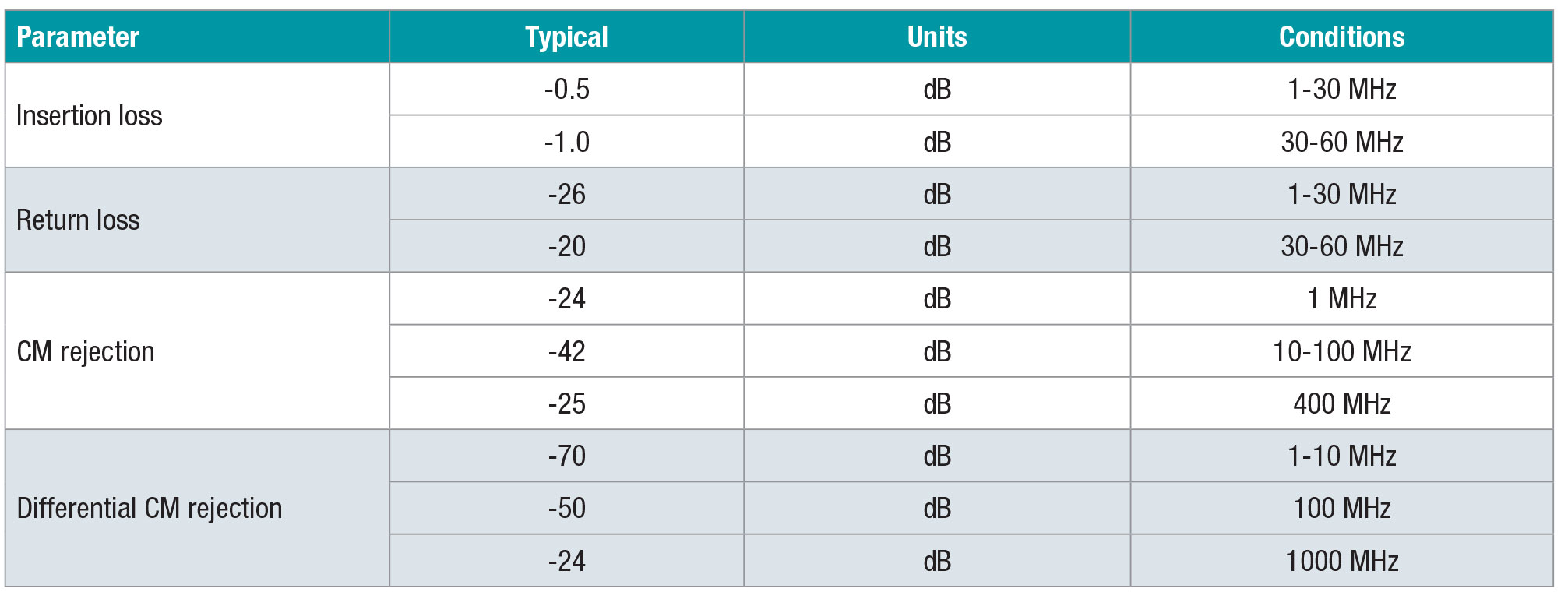
Tabella 4. Parametri VCMC per lo standard 100BASE-T1.
Componenti supplementari
Prima che la segnalazione PAM3 lasci la scheda o entri sulla scheda, molti componenti condizionano il segnale per la trasmissione e la ricezione. Gli obiettivi di questi componenti esterni consistono nell’isolare l’MDI per evitare loop di massa e offset CC del driver, migliorare il filtro del rumore CM e ridurre le emissioni irradiate mantenendo un’elevata immunità [9], [12].
Filtraggio del rumore CM
Un filtro a bobina di blocco di modo comune (CMC, common-mode choke) filtra il rumore CM sull’MDI. È importante ridurre il rumore CM il più possibile, poiché può disturbare il ricevitore di PHY. Inoltre, il rumore CM produce emissioni irradiate più elevate poiché costituisce una fonte di energia single-ended. La Tabella 4 elenca i requisiti che una CMC deve soddisfare per l’utilizzo con un PHY 100BASE-T1.
Isolamento CC
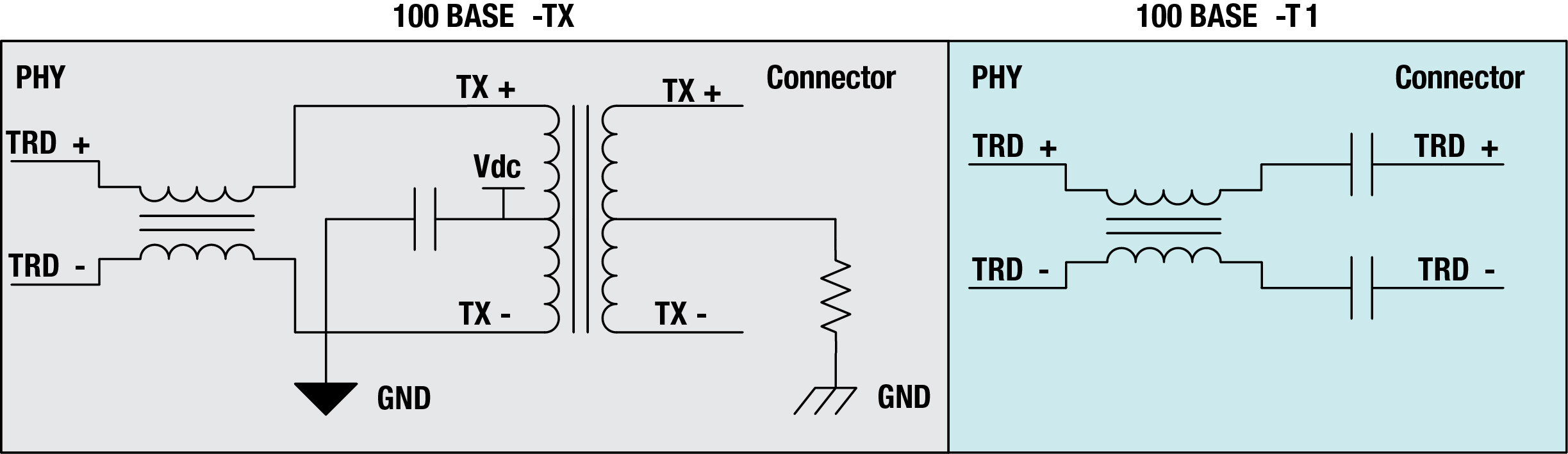
La Figura 5 mostra come ottenere l’isolamento CC sia per 100BASE-TX che per 100BASE-T1.
I PHY 100BASE-TX utilizzano in genere trasformatori con presa centrale (sul lato PHY) collegata a una tensione CC dipendente dal PHY. I trasformatori utilizzano anche la terminazione Bob Smith (presa centrale, sul lato del connettore, collegata a massa attraverso un resistore) per contribuire a migliorare il filtraggio del rumore CM [12].
Il 100BASE-T1 ha un approccio più semplice con l’utilizzo di soli due condensatori. I due condensatori forniscono l’isolamento CC e riducono le dimensioni della soluzione rispetto a un’applicazione con un trasformatore. La Figura 6 mostra un’implementazione tipica del circuito 100BASE-T1.
Figura 5. Confronto fra isolamento CC 100BASE-TX e 100BASE-T1.
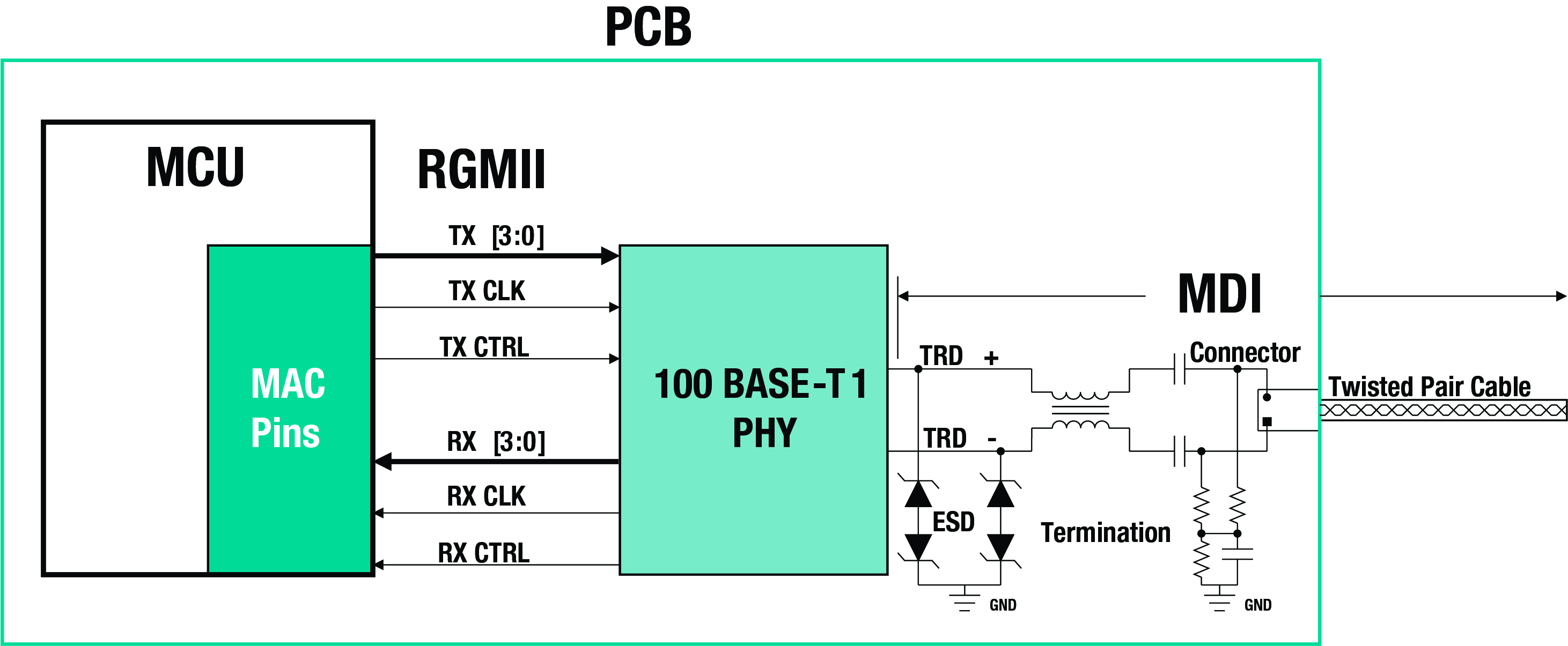
Figura 6. Implementazione tipica di 100BASE-T1.
Per ulteriori informazioni sull’implementazione di un progetto 100BASE-T1, consultare il progetto di riferimento del gateway autonomo per autoveicoli con Ethernet e CAN. Questo progetto di riferimento implementa il PHY 100BASE-T1 DP83TC811R-Q1 di TI in una tipica applicazione gateway automobilistica, con tutti i componenti del circuito selezionati per il progetto basato sullo standard 100BASE-T1.
Conclusione
Il 100BASE-T1 è il primo standard Ethernet specifico per il settore automobilistico volto a soddisfare le esigenze di rete sui veicoli. Si basa sulle lezioni apprese da 10BASE-T, 100BASE-TX e 1000BASE-T per soddisfare i severi requisiti in termini di emissioni automobilistiche, peso del cablaggio, costo e dimensioni di ingombro. Per ulteriori informazioni, si vedano le Soluzioni – Esempi di schemi circuitali, layout e distinta base per varie applicazioni con il DP83TC811S-Q1 di TI.
Gli OEM decideranno inevitabilmente come e dove implementare il 100BASE-T1 nei loro veicoli. In definitiva, comunque, il 100BASE-T1 è una tecnologia gateway che facilita l’adozione di reti di bordo per consentire l’ulteriore sviluppo di sistemi automobilistici.
A cura di Donovan Porter, Systems Engineer, Texas Instruments
Bibliografia
- C.M. Kozierok, C. Correa, R. Boatright e J. Quesnell. Automotive Ethernet – The Definitive Guide. Intrepid Control Systems, 2014.
- L. Bello. «The Case for Ethernet in Automotive Communications». ACM SIGBED Review – Edizione speciale per il 10º International Workshop on Real-Time Networks (RTN 2011), Vol. 8, No. 4, pagg. 7-15, 2011.
- D.A. Abaye. «BroadR-Reach Technology: Enabling One Pair Ethernet». Broadcom Corp., 2012.
- D. Pannell. «Audio Video Bridging (AVB) Assumptions IEEE 802.1 AVB Plenary». IEEE 802,1 AVB, Stoccolma, 2007.
- «White Paper Blu-Ray Disc Format 2.B Audio Visual Application Format Specifications for BDROM». Blu-Ray Disc Association, 2005.
- A. Aaron e D. Ronca. «High Quality Video Encoding At Scale». techblog.netflix.com, 2015.
- «DVD Forum White Paper HD DVD Format Overview». DVD Forum, 2007.
- R. Bielby. «ADAS Camera Requirements – Driving Memory Needs». Micron, 2017.
- «IEEE Standard for Ethernet Amendment 1: Physical Layer Specifications and Management Parameters for 100Mbps Operation over a Single Balanced Twisted Pair Cable (100BASE-T1)». Standard IEEE 802.3bw, pagg. 39-63, 2015.
- «IEEE 100BASE-T1 (Formerly OABR)». Vector Informatik GmbH, 19 ottobre, 2016. [Online]. Disponibile: https://elearning.vector.com/index.php?&wbt_ls_seite_id=1588373&root=378422&seite=vl_automotive_ethernet_introduction_en. [Accesso effettuato il 7 marzo 2018].
- R.J. Barry, E.A. Lee e D.G. Messershmitt. Digital Communication. Norwell, Massachusetts: Kluwer Academic Publishers Group, 2004.
- «ENT-AN0098 Application Note Magnetics Guide». Microsemi, Aliso Viejo, California: 2016.
- M. Sauerwald. «CAN Bus, Ethernet, or FPD-Link: Which is Best for Automotive Communications?» Texas Instruments Analog Applications Journal