Non ci sono prodotti a carrello.
In una sala conferenze moderna, uno dei principali ostacoli all’installazione di un sistema audio è, al momento, quello di dover interconnettere una moltitudine di trasduttori d’ingresso/uscita alla console audio principale. Di solito, questi impianti vengono realizzati mediante collegamenti singoli punto-punto, uno per nodo, realizzati con cavi schermati che formano una massa notevole e richiedono comunque alimentazioni esterne separate per ciascuno di essi. Oltre a essere voluminosi, questi cavi trasportano segnali audio analogici che sono soggetti a un degrado significativo dello spettro, specialmente sui collegamenti a lunga distanza o quando si è scelto di utilizzare cavi a costo ridotto.
I transceiver per bus audio automotive, con tecnologia A2B®, supportano l’audio digitale multicanale su un singolo cavo non schermato a coppie intrecciate (UTP – Unshielded Twisted Pair). È possibile collegare in daisy-chain svariati nodi transceiver e, oltre a trasportare audio digitale in alta fedeltà, il bus A2B può fornire alimentazione dc ai nodi remoti. La Figura 1 illustra lo schema a blocchi funzionale di un transceiver A2B.
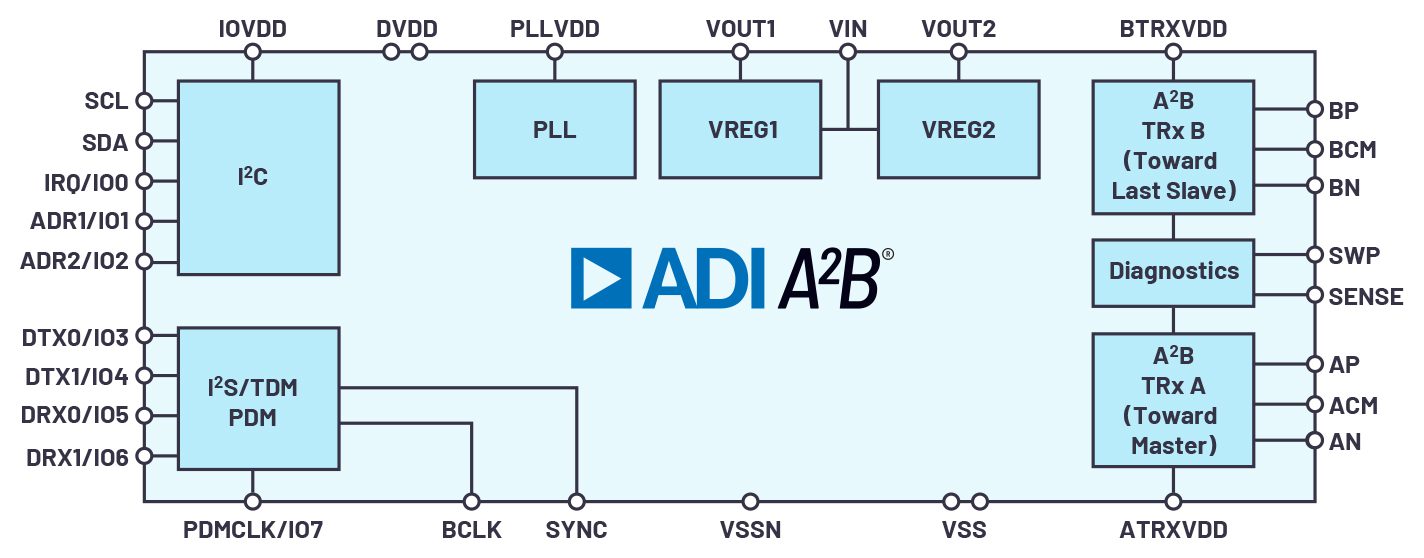
Figura 1. Schema blocchi funzionale A2B
Nonostante la tecnologia dei transceiver A2B sia stata progettata principalmente per risolvere il problema dell’ingombro dei cablaggi nelle applicazioni automotive, rappresenta certamente un sistema di trasporto audio molto più generico, con un’ampia gamma di applicazioni possibili. Per la tecnologia A2B, uno di questi impieghi, al di fuori dell’ambito automotive, si colloca nei sistemi di conferenza delle sale riunioni. In un moderno sistema per conferenze di questo genere vi è l’esigenza di distribuire sul perimetro del locale un significativo numero di microfoni, a volte anche di altoparlanti, per implementare varie funzioni DSP come beamforming, cancellazione del rumore o dell’eco. Un’altra applicazione possibile potrebbe essere negli auditorium pubblici, in sale convegni e in luoghi che richiedono la traduzione simultanea in tempo reale. Negli ambienti a capacità più elevata, ciò che realmente costituisce un limite all’applicazione A2B è la lunghezza totale del cavo per singolo bus, che è limitata a 40 metri complessivi.
In applicazioni di questo genere, i transceiver A2B potrebbero essere utilizzati per semplificare il cablaggio dei nodi audio remoti, fornendo allo stesso tempo un mezzo di trasporto digitale di qualità superiore, con l’opzione di distribuire anche l’alimentazione. Il metodo usato precedentemente per connettere questi nodi audio remoti, come illustrato in Figura 2, consisteva nell’utilizzare cavi schermati che trasportavano un segnale analogico unico, in una sola direzione, con l’alimentazione fornita separatamente attraverso un alimentatore dc. Come illustrato in Figura 3, con l’impiego dell’A2B una singola coppia intrecciata può invece trasportare fino a 32 canali audio digitali in upstream e/o fino a 32 in downstream, oltre all’alimentazione sul bus; utilizzando un formato dati a 16-bit, il numero complessivo dei canali gestibili dal bus è limitato a 50. In confronto ai tradizionali metodi analogici, è molto probabile che queste caratteristiche dell’A2B, se sviluppate nei sistemi di audio conferenza, possano portare enormi vantaggi attraverso la semplificazione del cablaggio e l’aggiunta della comunicazione bidirezionale digitale in alta fedeltà.
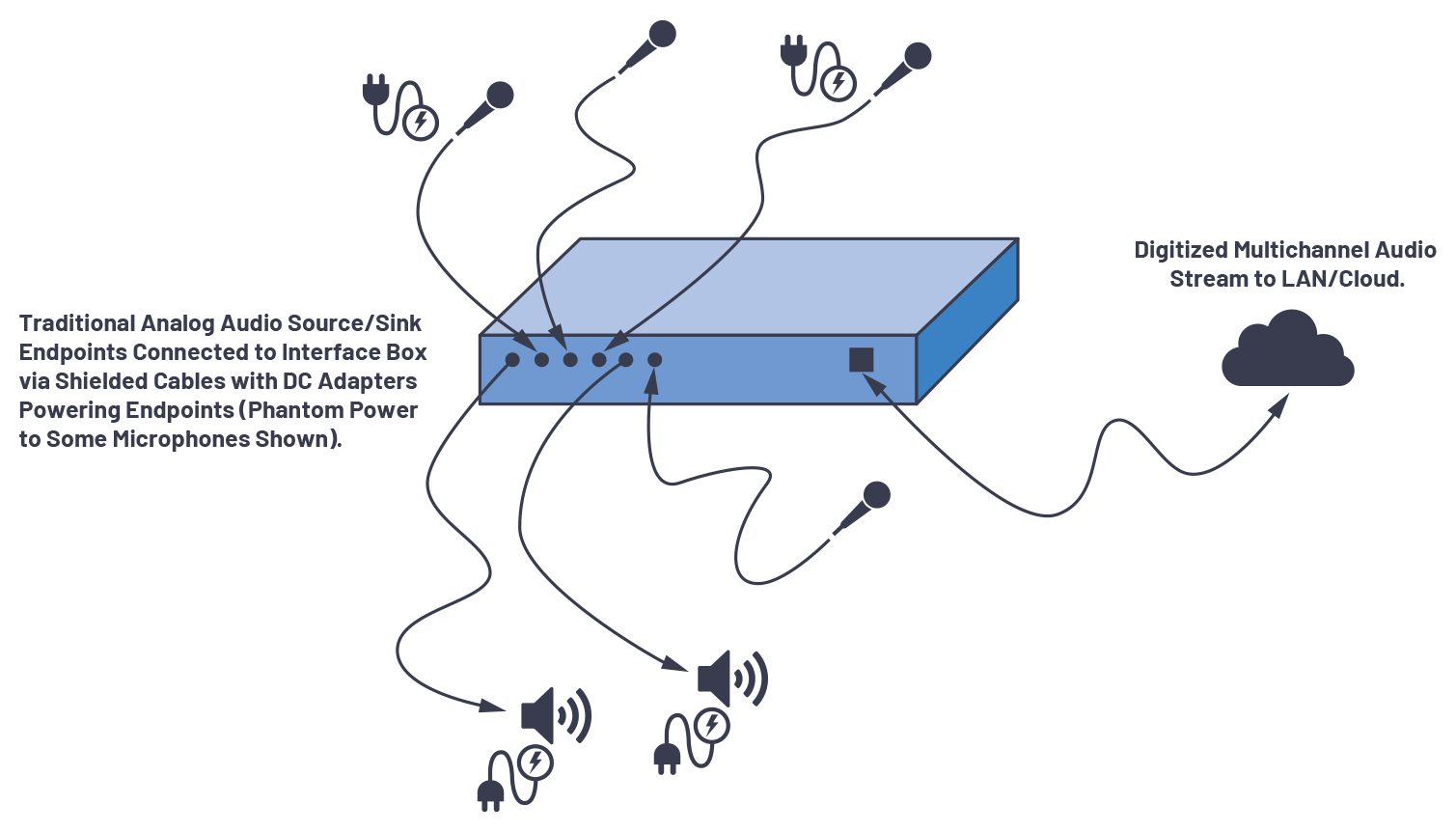
Figura 2. Installazione audio tradizionale in una sala conferenze
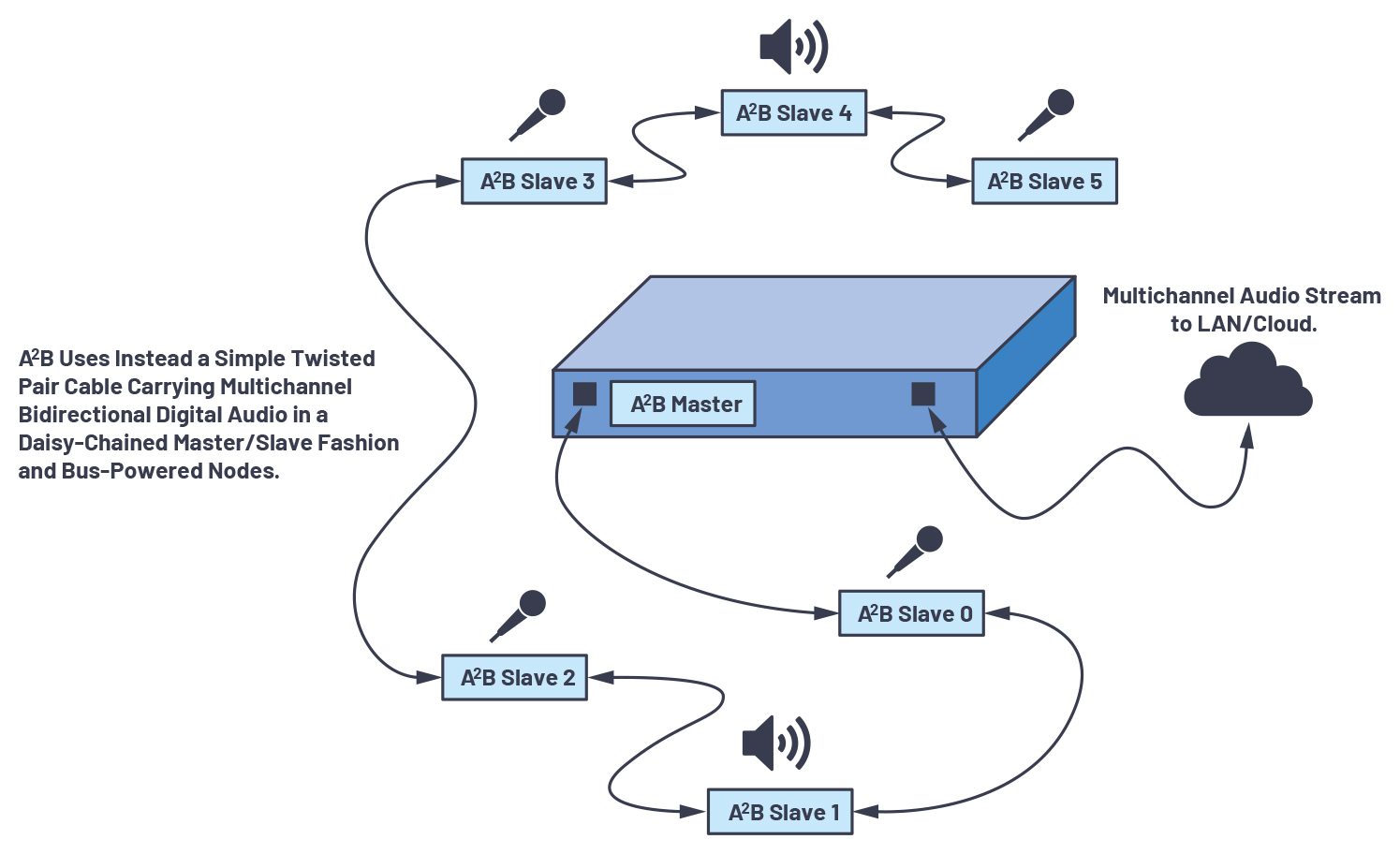
Figura 3. Utilizzo dell’A2B per un’installazione audio in una sala conferenze
Il transceiver A2B connette dati I2S (Inter-IC Sound) multicanale e sincroni, con modulazione a impulsi codificati (PCM – Pulse Code Modulated), fino a 15 metri tra un nodo e l’altro e fino a una lunghezza complessiva di 40 metri tra tutti i nodi. Estende anche la natura sincrona e “time-division multiplexed” (TDM) dell’I2S ai molteplici nodi collegati in un sistema, nel quale ciascun nodo può acquisire dati, fornire dati o svolgere entrambe le funzioni. Oltre al contenuto audio, questi dati possono includere funzioni di controllo: per esempio, una linea GPIO del transceiver A2B (sul quale, tipicamente, ve ne sono 7 disponibili) può essere collegata a un LED sul nodo del microfono ed essere commutata on/off a distanza dall’host, per indicare lo stato di microfono attivo (in ascolto) o inattivo (silenziato).
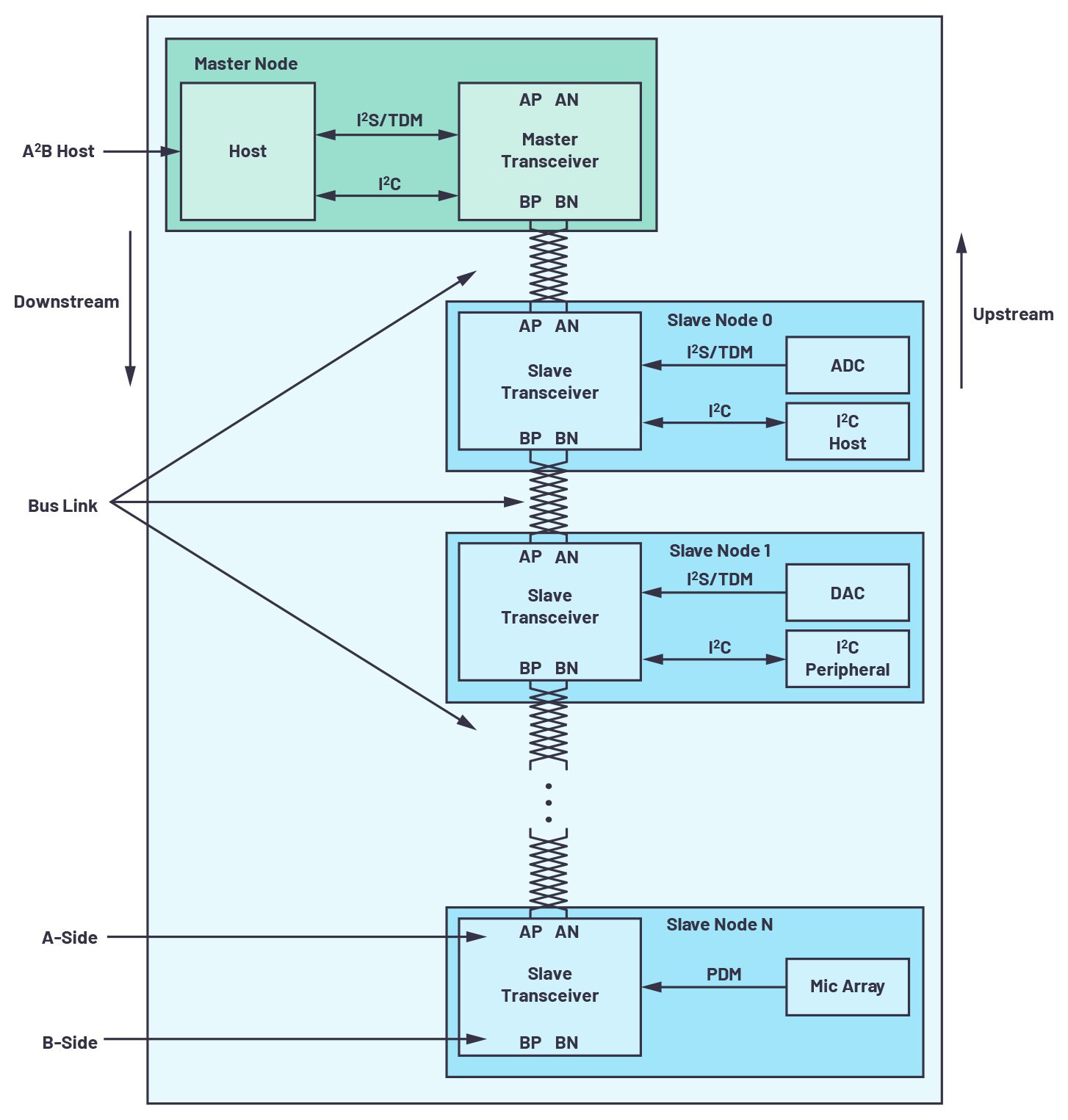
Figura 4. Sistema A2B semplificato con quattro nodi (un nodo master e tre slave).
Il bus A2B è un sistema a singolo master e slave multipli dove il transceiver dal lato del controller host è il master. Il nodo master genera clock, sincronizzazione e segnali di framing per tutti i nodi slave. Il chip master A2B è programmabile attraverso un bus di controllo (I2C) per configurazione e rilettura. Un’estensione di questo bus di controllo è integrata nel flusso dati A2B, consentendo sia l’accesso diretto ai registri e alle informazioni di stato sui transceiver slave, sia la comunicazione a distanza I2C-I2C. All’accensione del sistema viene utilizzata una procedura di discovery, nella quale ogni nodo viene riconosciuto e si formano i requisiti della struttura TDM. Tutti i nodi slave vengono riconosciuti in sequenza, da slave 0 fino all’ultimo slave disponibile nel sistema. Una volta che tutti i nodi slave sono stati riconosciuti, ciascuno di essi viene inizializzato per lo scambio sincrono dei dati. La Figura 4 illustra un semplice esempio di sistema A2B con quattro nodi. Il programma host si registra in ciascun nodo per controllare il traffico dati sul bus A2B. In questo esempio, i dati in arrivo da microfoni digitali e ADC nei nodi slave 0 e N vengono inviati al noto master mentre, allo stesso tempo, i dati altoparlante in uscita dal nodo master vengono inviati al DAC del nodo slave 1. Come illustrato in questo esempio, il transceiver A2B incorpora anche un’interfaccia PDM multicanale per il collegamento diretto di array di microfoni di tipo “pulse-density modulated”.
[boris]
Il numero dei canali audio per ciascun nodo slave è programmabile singolarmente fino a 32 canali in upstream e fino a 32 in downstream. Per adeguarsi alle varie lunghezze di data word I2S/TDM, è possibile utilizzare slot dati dalle dimensioni di 8, 12, 16, 20, 24, 28, o 32 bit, ma la dimensione prescelta deve essere utilizzata per tutti i nodi. Per l’upstream e il downstream dei dati è possibile scegliere anche slot di dimensione diversa. Inoltre, come opzione, slot con dimensioni di 12-, 16- o 20-bit possono portare dati compressi sul bus A2B per word I2S/TDM di lunghezza 16-, 20-, o 24-bit. La frequenza di campionamento audio (fSYNCM), sincrona per tutti i nodi, può essere predisposta da 44,1 kHz a 48 kHz. I nodi slave supportano frequenze di campionamento (fS) di 1× (48 kHz), 2× (96 kHz), o 4× (192 kHz), configurabili singolarmente per ogni slave. Per poter supportare le velocità di campionamento 2× e 4× nei nodi slave, il nodo master deve usare 2× e 4× il numero dei canali di dati I2S/TDM sulla propria interfaccia 1× fSYNCM verso l’host. I transceiver A2B includono anche un sistema robusto per il rilevamento degli errori, sia per dati di controllo che di stato, con una verifica CRC a 16-bit. Un’altra caratteristica di rilievo disponibile sui transceiver A2B è la diagnostica delle anomalie, con la quale si possono rilevare le situazioni in cui i fili del bus A2B si trovano in cortocircuito, sia verso una tensione di alimentazione o verso terra, sia cortocircuitati tra loro, oppure quando vengono invertiti, o esiste un’interruzione sul collegamento.
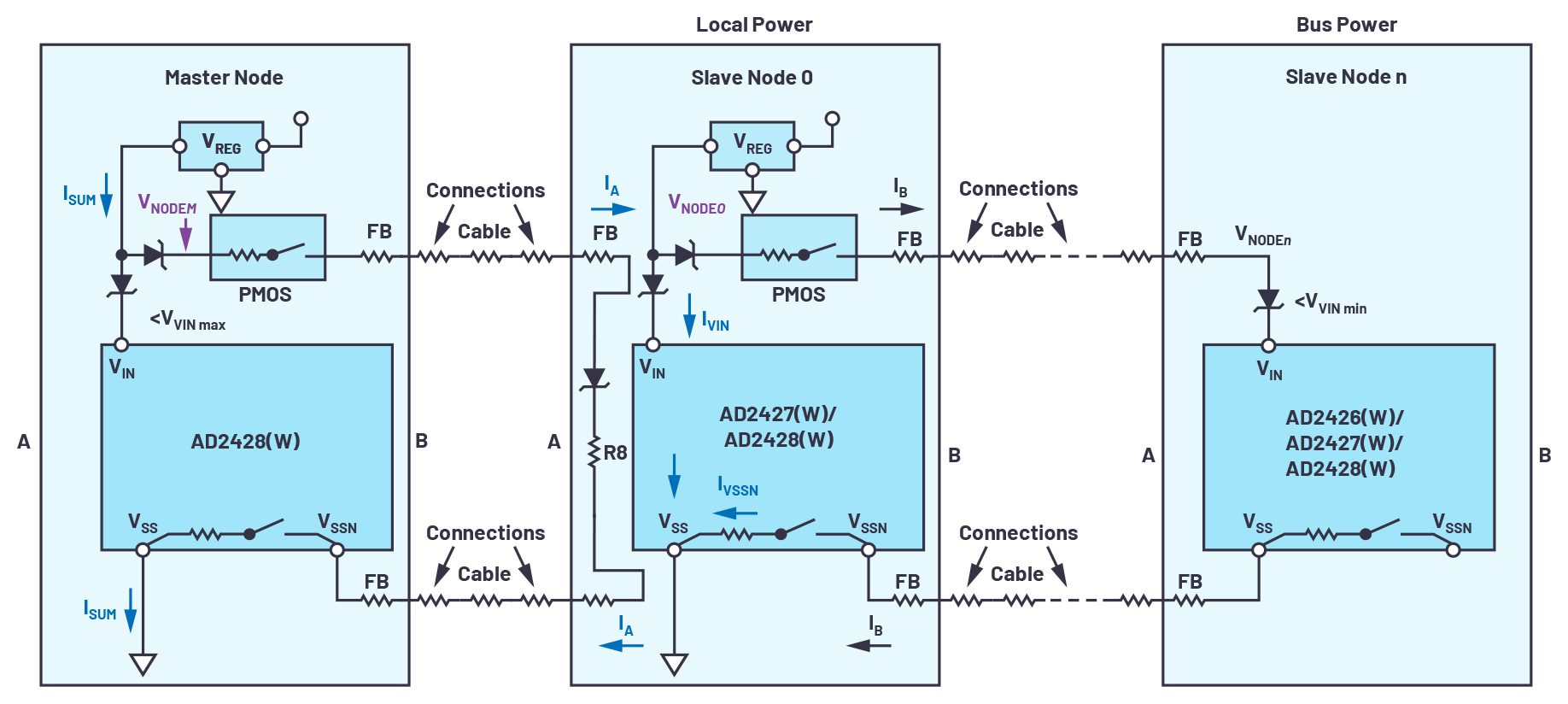
Figura 5. Modello di alimentazione dc per un sistema con slave ad alimentazione locale e tramite bus.
In un sistema alimentato dal bus, l’assorbimento periferico della corrente di alimentazione ha un impatto diretto su tutti gli altri nodi del sistema. È importante mantenersi entro i limiti di dissipazione termica del package e non superare le massime specifiche di IVSSN e VIN in ciascun nodo del bus A2B (300 mA/100 mA al limite IVSSN di 1,2 Ω per lo switch interno, a seconda del modello di transceiver, e una tensione massima VIN di 9 V applicata al proprio regolatore d’ingresso). Il Data Sheet del transceiver A2B fornisce esempi esaustivi per il calcolo della potenza complessiva di alimentazione, la Figura 5 illustra un modello di sistema alimentato tramite il bus.
Nonostante il bus A2B possa funzionare anche con un semplice cavo bifilare, la scelta di cavi e connettori di tipo appropriato permetterà di soddisfare i requisiti più severi dei test EMC che vengono solitamente richiesti dall’industria. La scelta del cavo adatto è necessaria a fornire buone prestazioni elettriche anche oltre gli intervalli tipici di emissione spettrale, di modo che non si verifichino transizioni da modo differenziale a modo comune in corrispondenza delle armoniche delle frequenze di comunicazione.
Grazie a una gamma completa di schede di valutazione, i progettisti possono collaudare e valutare interamente le prestazioni dei dispositivi A2B, prima di impegnarsi nell’implementazione del progetto completo. Di seguito ci sono alcuni esempi delle schede di valutazione messe a disposizione da ADI.
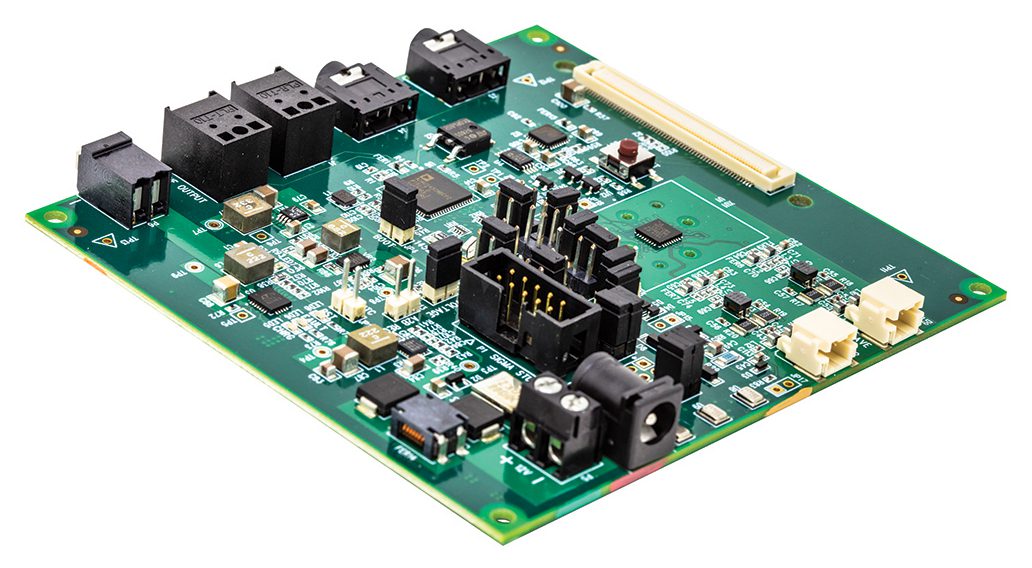
Figura 6. EVAL-AD2428WD1BZ, master o slave A2B con alimentazione locale (I2S/TDM, tre ingressi per microfoni PDM)
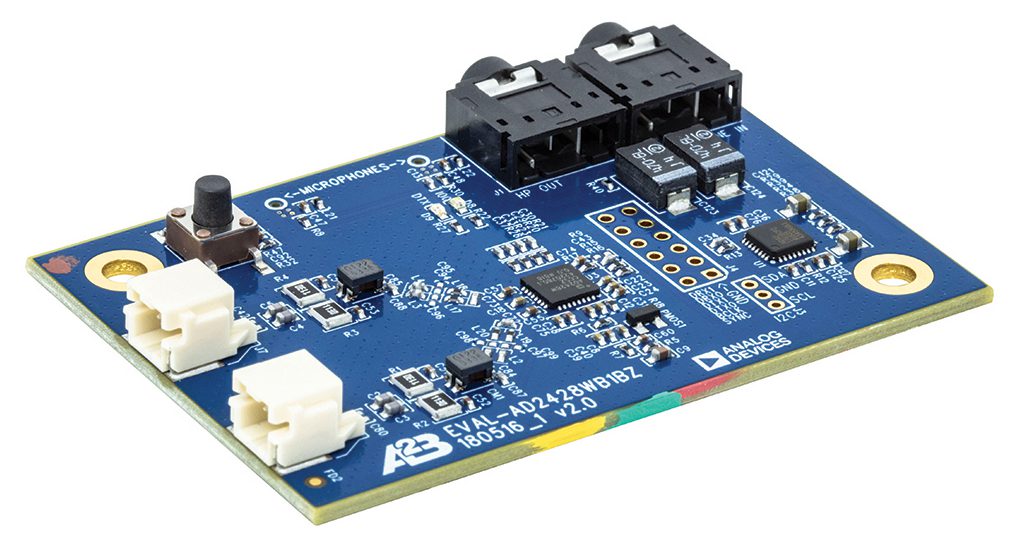
Figura 7. EVAL-AD2428WB1BZ, nodo slave A2B alimentato dal bus (I2S/TDM, due ingressi per microfoni PDM)

Figura 8. EVAL-AD2428WC1BZ, nodo slave A2B alimentato dal bus (senza I2S/TDM, quattro ingressi per microfoni PDM)
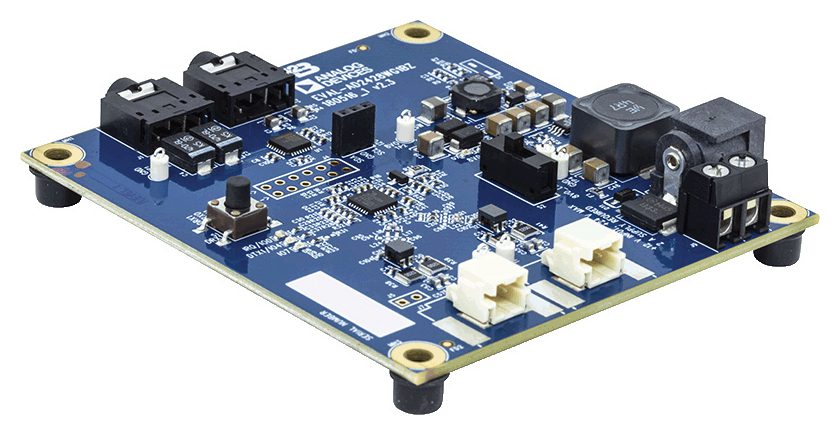
Figura 9. EVAL-AD2428WG1BZ, nodo slave A2B alimentato localmente (I2S/TDM, nessun ingresso microfonico PDM)
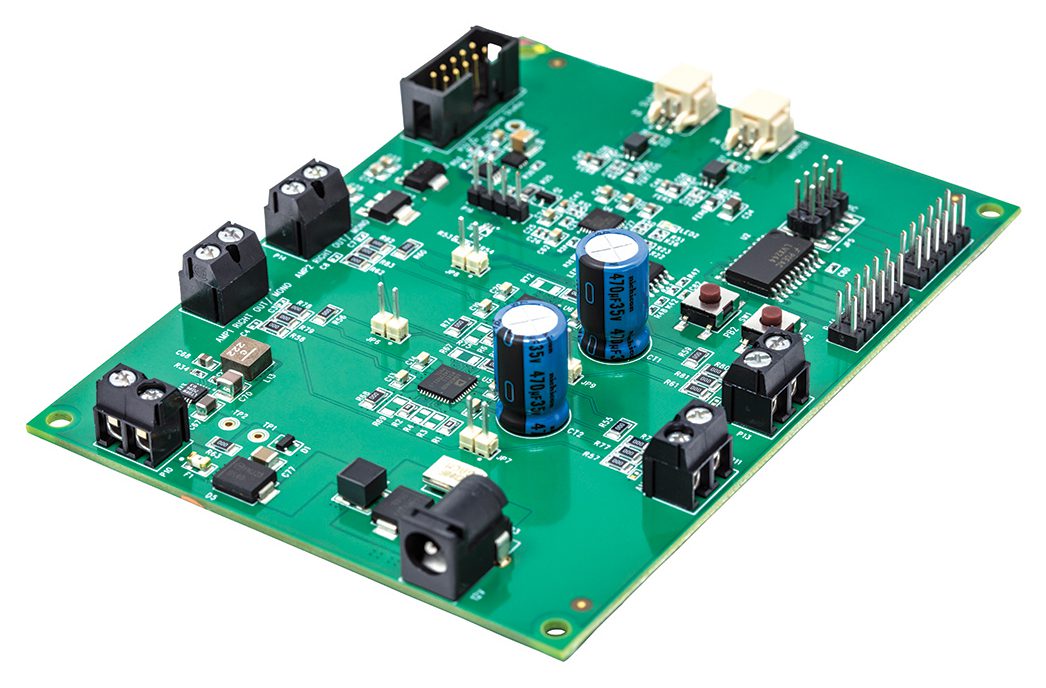
Figura 10. ADZS-AUDIOA2BAMP, un modulo A2B con amplificatore in Classe D
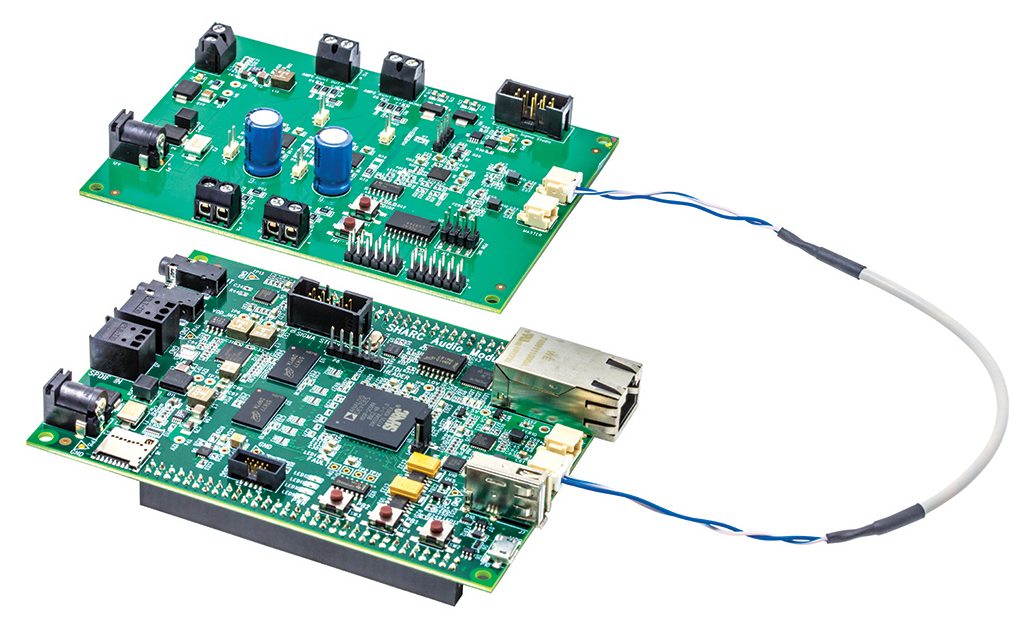
Figura 11. Modulo audio SHARC®: una piattaforma hardware/software espandibile per applicazioni audio
Per ulteriori risorse di progetto sulla tecnologia A2B di Analog Devices, cliccate qui.
[/boris]