Non ci sono prodotti a carrello.
La cassetta degli attrezzi del progettista elettronico continua a crescere. Trovare lo strumento giusto per un dato lavoro richiede la comprensione del compito da svolgere, la conoscenza degli strumenti esistenti e, infine, sapere come utilizzarli al meglio.
Spostare segnali e potenza attraverso una barriera di isolamento è una sfida comune per i progettisti: l’isolamento potrebbe essere necessario per motivi di sicurezza, immunità al rumore o per le grandi differenze di potenziale tra i domini di sistema. Ad esempio, un caricabatterie per cellulare è isolato internamente per evitare che le persone si colleghino elettricamente alla rete in caso di cortocircuito del connettore. In altre applicazioni, come i robot in fabbrica, i circuiti di controllo sensibili si trovano su una messa a terra separata e sono isolati dai motori elettrici che assorbono grandi correnti in DC e generano rumore e rimbalzi a terra.
La comunicazione e il rilevamento sono solitamente implementati attraverso una barriera di isolamento. Le applicazioni automobilistiche che utilizzano comunicazioni con protocollo Controller Area Network (CAN) o CAN Flexible Data Rate (FD) possono isolare questi segnali dal lato ad alta tensione dell’automobile utilizzando un transceiver CAN isolato che integri i componenti dell’isolamento e del transceiver. Inoltre, anche le applicazioni industriali possono utilizzare il protocollo CAN, ma possono usare anche il protocollo RS-485 per comunicazioni seriali a lunga distanza. Analogamente all’isolamento dei segnali CAN e CAN FD, i progettisti possono sfruttare i transceiver isolati progettati per il protocollo RS-485. I relè di protezione utilizzano sensori di corrente e tensione isolati per rilevare l’energia che si sposta sulla rete. Gli inverter di trazione e gli azionamenti di motori elettrici ricevono un segnale con modulazione di larghezza di impulso dal controller del motore e lo fanno passare attraverso un isolatore per far sì che il driver del gate attivi o disattivi un transistor bipolare a gate isolato.
I convertitori a polarizzazione isolati consentono la comunicazione e il rilevamento isolati mandando l’alimentazione polarizzata da un lato della barriera di isolamento all’altro. I sensori di corrente e tensione, gli isolatori digitali e i driver del gate richiedono in genere meno di 15 W e appena poche decine di milliwatt di potenza. La Figura 1 mostra un esempio per ciascuna di queste applicazioni.
Requisiti di alimentazione a polarizzazione isolata in DC/DC
Sono molte le soluzioni in grado di fornire alimentazione polarizzata isolata, dai controller, che dispongono di interruttori di alimentazione esterni, ai convertitori, che integrano un controller con interruttori di alimentazione, fino ai moduli di alimentazione, che integrano controller, interruttori di alimentazione e trasformatori in un unico package. Per via di questa vasta gamma di soluzioni per l’alimentazione polarizzata e delle svariate applicazioni in cui si trovano è importante comprendere appieno i requisiti di una data applicazione al fine di soddisfare le specifiche al minor costo possibile.
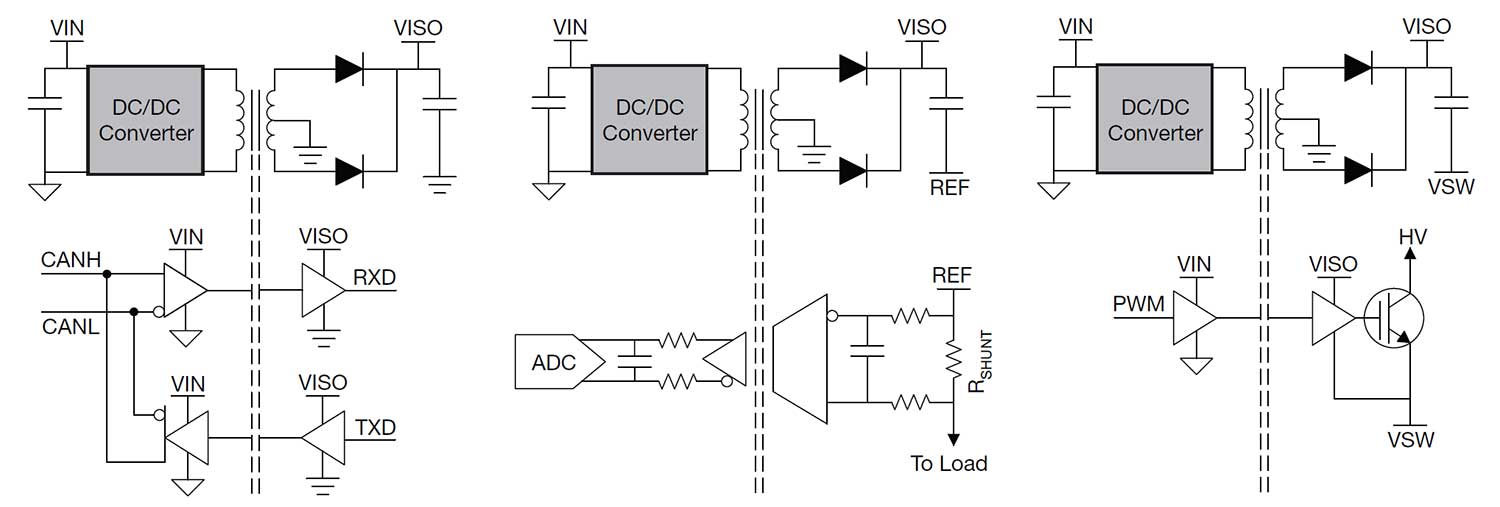
Figura 1. Applicazioni a polarizzazione isolate.
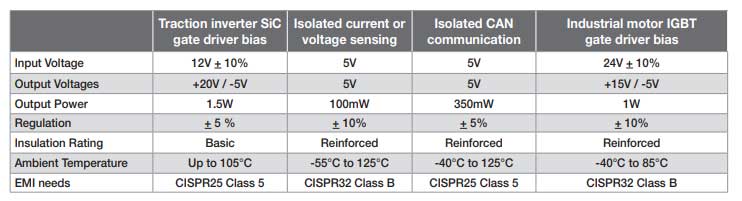
Tabella 1. Esempio di specifiche per convertitore a polarizzazione isolato.
Come minimo, il progettista dovrebbe capire l’intervallo di tensione di ingresso dell’alimentazione a polarizzazione, la tensione di uscita e i requisiti di potenza di uscita. Alcune applicazioni richiedono più di una tensione di polarizzazione, pertanto è importante definire la regolazione accettabile per ciascuna uscita. Requisiti di sistema come il grado di isolamento, l’intervallo di temperature ambiente d’esercizio, le interferenze elettromagnetiche (EMI) e la compatibilità elettromagnetica (EMC) sono ulteriori fattori che guidano le decisioni di progettazione. La Tabella 1 mostra solo quattro esempi di un panorama estremamente ampio di specifiche per i convertitori a polarizzazione isolati.
Passiamo ora a considerare alcuni esempi di topologie di alimentazione a polarizzazione isolata.
Flyback
Il convertitore flyback è una topologia ben nota che è stata ampiamente utilizzata per decenni. Questo convertitore di potenza è in grado di supportare una gran varietà di applicazioni grazie alla sua flessibilità e al basso costo. Progressi come l’integrazione di transistor a effetto di campo (FET) e il controllo del lato primario rendono questa topologia ancora più interessante.
Rispetto alle topologie di derivazione buck, come forward, push-pull e half-bridge, la topologia flyback richiede un solo interruttore primario, un raddrizzatore e un induttore accoppiato simile a un trasformatore. La Figura 2 mostra uno schema semplificato del convertitore. Quando l’interruttore primario è acceso, la tensione di ingresso viene applicata attraverso l’avvolgimento primario, immagazzinando energia nel traferro del trasformatore. In questo stato, il carico di uscita è supportato solo dal condensatore di uscita. Quando l’interruttore primario si spegne, l’energia immagazzinata nel trasformatore viene mandata al secondario attraverso il raddrizzatore per alimentare il carico e ricaricare i condensatori di uscita.
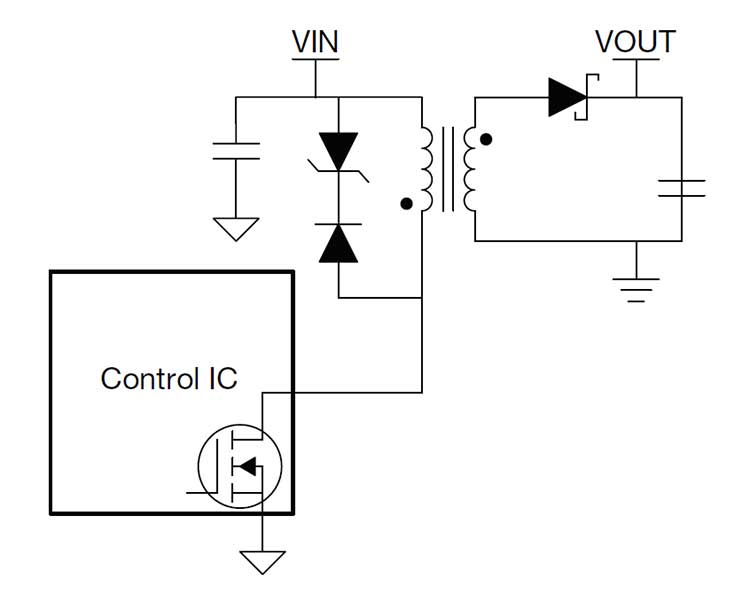
Figura 2. Un convertitore flyback.
Un convertitore flyback funziona bene come convertitore a polarizzazione per una serie di motivi. Ad esempio, fornisce regolazione e isolamento in un singolo stadio di conversione. Inoltre, la sua flessibilità è utile anche per uscite multiple. È possibile scegliere il numero di avvolgimenti di uscita e avvolgere il trasformatore in modo da supportare la configurazione scelta. La tensione corrispondente sugli avvolgimenti di uscita è una funzione del duty cycle e del rapporto delle spire degli avvolgimenti fra primario e secondario. Inoltre è possibile fare in modo che ciascuna uscita faccia riferimento ad una messa a terra diversa per soddisfare i requisiti di isolamento del sistema. Altri vantaggi del flyback includono il suo costo relativamente basso e l’ampio intervallo operativo tra ingresso e uscita.
È importante progettare correttamente un trasformatore flyback per ottenerne le prestazioni migliori. Il trasformatore deve essere accoppiato molto bene, avere una bassa induttanza di dispersione per ottenere la massima efficienza e la migliore regolazione, specialmente in caso di uscite multiple. Tuttavia, è anche necessario limitare la capacità parassita dal primario al secondario al fine di prevenire eccessive interferenze elettromagnetiche (EMI).
Convertitore Fly-Buck
Un convertitore Fly-Buck è una topologia specifica di Texas Instruments utilizzata per creare un’alimentazione a polarizzazione isolata. È in grado di funzionare con tensioni di ingresso fino a 100 V. Analogamente ad un convertitore flyback, all’interno del circuito integrato sono tipicamente integrati i transistor metallo-ossido-semiconduttore a effetto di campo (MOSFET) ed è molto semplice realizzare il controllo sul lato primario. La Figura 3 mostra un convertitore Fly-Buck. La topologia utilizza un convertitore buck sincrono con un induttore accoppiato per creare una o più uscite isolate. Quando l’interruttore high-side è attivato, il lato primario funziona come un convertitore buck e la corrente dell’avvolgimento secondario è zero. Allo stato spento, quando l’interruttore low-side è attivo, il lato secondario è azionato dall’energia immagazzinata nel primario.

Figura 3. Un convertitore Fly-Buck.
I convertitori buck sincroni sono ampiamente disponibili e fanno del convertitore Fly-Buck una topologia interessante. Il convertitore non richiede un avvolgimento ausiliario aggiuntivo o un fotoaccoppiatore per il controllo poiché il circuito di feedback può essere chiuso sulla tensione di uscita primaria. La struttura dell’induttore accoppiato è flessibile. Il rapporto delle spire, il grado di isolamento, il numero di avvolgimenti del secondario e il duty cycle PWM sono controllabili per consentire l’uso in un’ampia varietà di applicazioni. Come il convertitore flyback, l’induttore accoppiato deve essere progettato correttamente. È importante gestire l’induttanza di dispersione limitando la capacità parassita dal primario al secondario. Per applicazioni che richiedono ingressi superiori a 100 V è possibile utilizzare un convertitore Fly-Buck con un MOSFET esterno.
Driver trasformatore push-pull
Un driver trasformatore push-pull è una soluzione usata comunemente per alimentatori isolati a basso rumore e con fattore di forma ridotto. È alimentato da un rail di ingresso rigidamente regolato e funziona in un circuito aperto con un duty cycle fisso del 50%. I MOSFET sono integrati nel circuito integrato e consentono una soluzione compatta. La Figura 4 mostra la topologia push-pull. La topologia push-pull è una variante a terminazione doppia della topologia forward con entrambi i MOSFET dotati di riferimento a terra e permette di eliminare la necessità di circuiti di bootstrap esterni. Analogamente al convertitore forward a terminazione singola, la sollecitazione di tensione sui FET è il doppio della tensione di ingresso. I MOSFET commutano con un duty cycle del 50% durante semicicli alternati e azionano quindi l’avvolgimento a presa centrale del trasformatore.
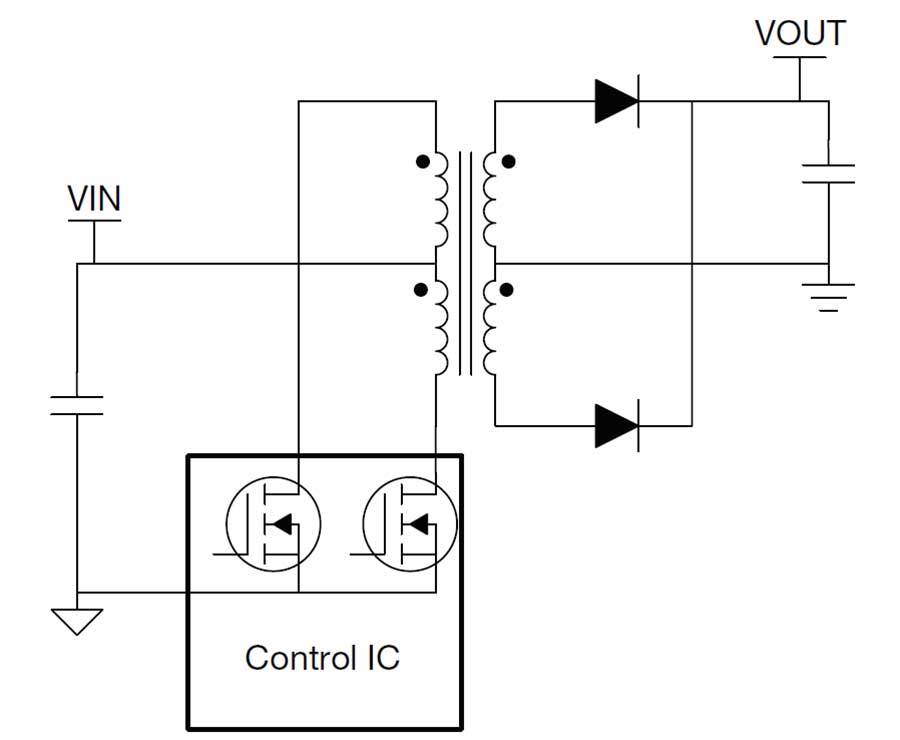
Figura 4. Un driver trasformatore push-pull.
Il driver trasformatore push-pull è una soluzione di alimentazione polarizzata isolata adottata in prevalenza per molti motivi. Esso offre flessibilità e la capacità di supportare uscite multiple. La configurazione a circuito aperto offre semplicità di progettazione eliminando il circuito di feedback. Il trasformatore push-pull offre inoltre un’inferiore capacità primario-secondario, che consente quindi di ridurre il rumore di modo comune rispetto ai convertitori flyback e Fly-Buck. Inoltre la topologia push-pull utilizza in modo più efficiente la corrente di magnetizzazione del nucleo del trasformatore, dando quindi origine ad una soluzione magnetica più piccola rispetto ai convertitori flyback e Fly-Buck.
Sebbene il driver trasformatore presenti una serie di vantaggi, è importante tenere conto anche dei compromessi che esso comporta. A differenza dei convertitori flyback e Fly-Buck, il driver trasformatore non è in grado di supportare un ampio intervallo di tensioni di ingresso e richiede invece una tensione di ingresso rigidamente regolata. Soddisfare i requisiti di regolazione della tensione di uscita per il feedback può risultare difficile a causa dell’assenza di un circuito chiuso e può richiedere un post-regolatore a basso dropout (LDO).
Moduli di alimentazione
I moduli di alimentazione esistono da decenni. Queste soluzioni sono ampiamente disponibili e offrono una notevole integrazione rispetto alle implementazioni discrete. I moduli di alimentazione esistono in molte varietà diverse per tensione di ingresso, tensione di uscita, potenza di uscita, numero di uscite, grado di isolamento e opzioni di regolazione.
La Figura 5 mostra lo schema a blocchi del funzionamento interno di un modulo di alimentazione. La topologia include un driver trasformatore simile alla versione discreta. Alcuni dispositivi possono integrare un LDO di uscita per la regolazione.
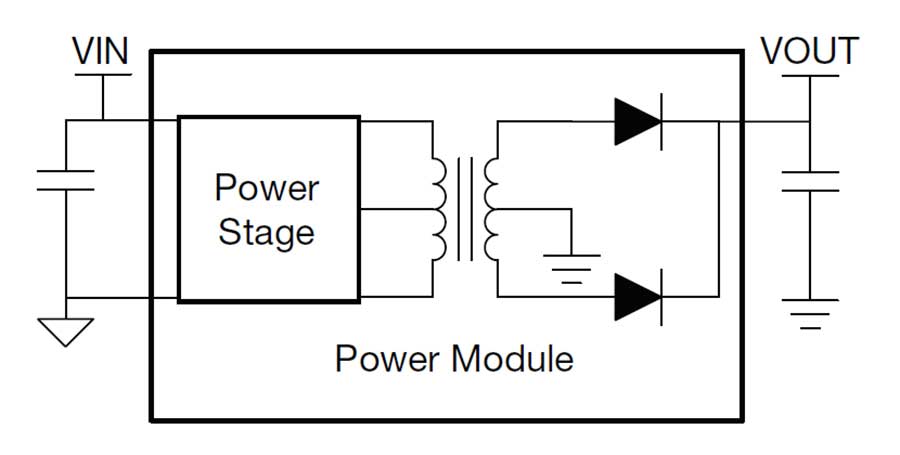
Figura 5. Un modulo di alimentazione.
Con così tante opzioni disponibili, è possibile utilizzare un modulo di alimentazione nella maggior parte delle applicazioni con convertitore a polarizzazione isolato. In questo modo si semplifica notevolmente il processo di progettazione perché non è necessario specificare, progettare o scegliere un trasformatore: è sufficiente includere un condensatore di disaccoppiamento in ingresso e in uscita per dare inizio alla progettazione. Inoltre sono disponibili altre opzioni come sincronizzazione, selezione della tensione di uscita, abilitazione e segnalazione degli errori. Tuttavia, con i moduli si perde una certa flessibilità, in particolare per configurare il numero di uscite e i rapporti delle spire del trasformatore. La possibilità di scelta dei moduli pensati per una temperatura ambiente di 125 °C è inferiore rispetto alle opzioni per 55 °C e 85 °C. Analogamente, il numero di moduli disponibili con caratteristiche di isolamento completamente rinforzato è inferiore a quello dei moduli disponibili con isolamento funzionale o di base.
Una soluzione di polarizzazione di nuova generazione
Le innovazioni nella progettazione dei trasformatori e le topologie a frequenza superiore hanno consentito ai progettisti di circuiti integrati di integrare un trasformatore e componenti elettronici in un unico circuito integrato. Per l’utente finale è quindi disponibile un alimentatore a polarizzazione DC/DC isolato, piccolo e leggero senza dover progettare un trasformatore o scendere a compromessi in termini di prestazioni del sistema.
La Figura 6 mostra lo schema a blocchi dell’UCC12050 di Texas Instruments. Sebbene si presenti simile ad un modulo di alimentazione con stadio di potenza e raddrizzatore integrati, uno sguardo più attento al funzionamento dell’UCC12050 mostra come la frequenza di commutazione sia molto più elevata rispetto ai moduli di alimentazione. Ciò consente una significativa riduzione di altezza e peso rispetto alle alternative con frequenza di commutazione inferiore. Lo schema di controllo della topologia interna opera su circuito chiuso senza LDO o componenti di feedback esterni.
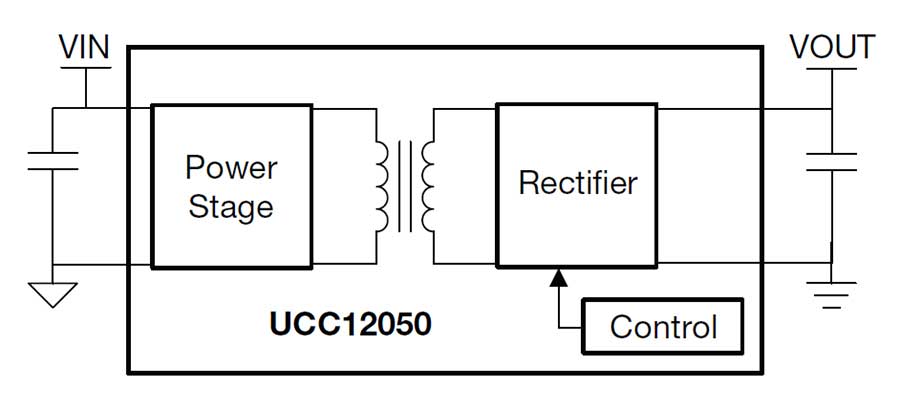
Figura 6. Alimentatore a polarizzazione UCC12050 DC/DC isolato.
L’UCC12050 offre numerosi vantaggi alla vasta gamma di applicazioni con alimentazione a polarizzazione DC/DC isolata. È progettato con un trasformatore ottimizzato per EMI con solo 3,5 pF di capacità da primario a secondario e con uno schema di controllo silenzioso. Di per sé la soluzione può passare i test CISPR32 di Classe B su un circuito stampato a due strati senza nuclei di ferrite o LDO. Il dispositivo è robusto, classificato per isolamento rinforzato di 5 kVrms e 1,2 kVrms di tensione di esercizio ed è in grado di funzionare ad una temperatura ambiente di 125 °C. La famiglia di dispositivi include anche l’UCC12040, che è classificato per isolamento di base di 3 kVrms e 800 Vrms di tensione di esercizio.
L’UCC12050 è destinato ad applicazioni con ingresso da 5 V e uscita da 3,3 V a 5,4 V che richiedono 500 mW. Le applicazioni che richiedono tensioni di ingresso o di uscita più elevate dovranno mettere a disposizione una pre-conversione o una post-conversione. Inoltre, per i progetti che richiedono potenza superiore alla curva di derating dell’UCC12050, si consiglia di valutare topologie alternative.
La Tabella 2 mette a confronto ciascuna delle topologie di cui sopra. È chiaro che le topologie con trasformatori esterni offrono la massima flessibilità, mentre i moduli di alimentazione e l’UCC12050 offrono la massima facilità d’uso.
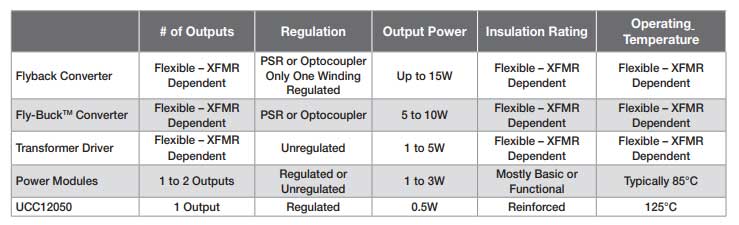
Tabella 2. Confronto fra le topologie di alimentazione polarizzata isolata.
Conclusione
Sono molte le opzioni disponibili per fornire energia attraverso una barriera di isolamento. È fondamentale comprendere le specifiche a livello di sistema, come numero di uscite, requisiti di regolazione, potenza di uscita, grado di isolamento, temperatura di esercizio e intervallo di tensioni di ingresso. Partendo da qui, è quindi possibile ricavare la soluzione più economica che soddisfi tutti i requisiti di sistema.
A cura di Ryan Manack, Business Lead, Texas Instruments