Non ci sono prodotti a carrello.

Con la crescita della capacità e la riduzione dei costi delle batterie, i veicoli elettrici (EV) stanno diventando sempre più comuni. Esattamente come le automobili con tradizionale motore a combustione interna (ICE, internal combustion engine) hanno creato l’esigenza di un maggior numero di stazioni di rifornimento, i veicoli elettrici spingeranno la domanda di sempre maggiori opzioni pubbliche per la ricarica.
Per massimizzare l’implementazione del maggior numero possibile di stazioni di ricarica, la tecnologia che entra in una stazione di ricarica deve essere efficiente e conveniente, oltre a fornire un’esperienza nel complesso positiva per il cliente. Un’ulteriore problematica è costituita dal dover implementare un’infrastruttura di ricarica che non si limiti a supportare i casi d’uso odierni con tragitti prevalentemente brevi e locali, ma che supporti anche una ricarica più rapida rispetto ai caricabatterie domestici, in modo da ridurre le preoccupazioni sui tempi di ricarica quando gli utenti devono coprire tragitti più lunghi.
Tipi di caricabatterie per veicoli elettrici
Le stazioni di ricarica si trovano installate in svariate situazioni: nelle abitazioni, in parcheggi pubblici vicino a ristoranti o uffici oppure in punti vendita commerciali come nei pressi di un minimarket. Attualmente, la Society of Automotive Engineers (SAE) definisce tre livelli diversi di stazioni di ricarica, note anche come EVSE (Electric Vehicle Supply Equipment):
- Le EVSE di Livello 1 utilizzano corrente elettrica da linea in CA standard negli USA, oppure monofase a 120 V tra 12 e 16 A altrove. La conversione dell’alimentazione da CA a CC avviene all’interno del veicolo. Queste stazioni relativamente a basso costo sono in grado di ricaricare la batteria di un veicolo elettrico completamente scarica con una capacità di 24 kWh in circa 17 ore.
- Le EVSE di Livello 2 si basano su una tecnologia simile al Livello 1, ma sono compatibili con una più potente linea di ingresso in CA polifase da 208 V-240 V a 15 A-80 A. Questa possibilità riduce a 7 ore il tempo di ricarica per una batteria completamente scarica.
- Le EVSE di Livello 3 differiscono dai Livelli 1 e 2 per il fatto che la conversione della potenza da CA a CC avviene all’interno della stazione di ricarica, pertanto è possibile alimentare la batteria con una linea ad alta tensione in CC per abbreviare il tempo di carica. Ne deriva che il costo e la complessità di una stazione di Livello 3 sono sensibilmente maggiori. Queste stazioni possono erogare un’alimentazione da 300 V fino a ~920 V ad un massimo di ~500 A. Il tempo di carica massimo sarebbe di circa 10-30 minuti a seconda del livello di energia nella batteria. A differenza dei Livelli 1 e 2, che sono più tipici degli impianti domestici dove i veicoli elettrici si ricaricano di notte, le stazioni di ricarica rapida in CC di Livello 3, più costose, si trovano solitamente in luoghi pubblici e condivisi e, in definitiva, il loro uso è probabile anche nelle stazioni di rifornimento.
Stadio di potenza
L’efficienza di conversione della potenza da CA a CC per la ricarica della batteria di un veicolo elettrico è fra gli aspetti più critici di una stazione di ricarica. Di conseguenza, è importante scegliere la topologia di conversione più efficace per il tipico caso d’uso di una stazione di ricarica. Il modulo di alimentazione in un caricabatterie rapido in CC comprende tipicamente un convertitore raddrizzatore da CA a CC e un convertitore CC/CC isolato, che verranno entrambi analizzati a seguire.
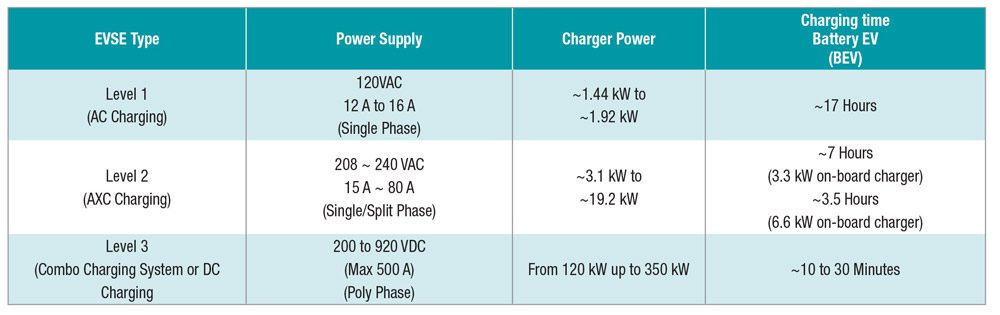
Tabella 1. Classificazione dei caricabatterie per veicoli elettrici.
Per ottenere gli elevati livelli di potenza di questi caricabatterie rapidi, il raddrizzatore da CA a CC è costituito da uno stadio PFC (correzione del fattore di potenza) con ingresso trifase in CA. Fra le topologie popolari per l’implementazione del PFC trifase vi sono un convertitore PFC totem-pole trifase o un convertitore PFC basato su raddrizzatore Vienna. Tra queste due topologie, i convertitori basati su raddrizzatore Vienna stanno assumendo sempre maggiore popolarità grazie all’implementazione della commutazione a tre livelli, all’efficienza superiore, alle ridotte sollecitazioni di tensione sui componenti e alla maggiore densità di potenza.
Analogamente ai convertitori CC-CC isolati, vi sono una serie di opzioni da considerare. I convertitori risonanti, come gli LLC, sono apprezzati per la loro capacità di raggiungere la commutazione a tensione zero (ZVS, Zero Voltage Switching) e la commutazione a corrente zero (ZCS, Zero Current Switching). Inoltre esistono molte varianti di convertitori LLC, come le topologie LLC half-bridge ed LLC full-bridge. Per applicazioni ad alta potenza e ad alta tensione, viene solitamente utilizzato un LLC full-bridge perché sfrutta meglio il nucleo magnetico e riduce la sollecitazione di corrente/la corrente nominale dei componenti. Inoltre è possibile applicare un approccio LLC interlacciato per ridurre i requisiti di filtraggio per una potenza maggiore all’uscita del convertitore.
Per ottimizzare il funzionamento dell’LLC per una vasta gamma di tensioni della batteria, è opportuno utilizzare una tensione PFC a collegamento variabile. Tuttavia si riscontrano alcune problematiche quando è presente una tensione variabile dall’uscita del PFC e aumenta la sollecitazione sui dispositivi di alimentazione. Il vantaggio del raddrizzatore Vienna per PFC, in questo caso, consiste nel fatto che si tratta di una topologia a tre livelli e, quind, l’aumento di sollecitazione è proporzionalmente inferiore sugli interruttori di alimentazione. Pertanto, i sistemi di ricarica rapida in CC di Livello 3 di fascia alta e ad alta potenza utilizzano spesso la combinazione di un raddrizzatore Vienna e di un convertitore risonante (LLC) full-bridge interlacciato (IL). La ragione per questa combinazione di topologie risiede nel fatto che è importante considerare la rapidità con cui è possibile estrarre potenza dalla rete e trasferirla nella batteria, che richiede solitamente un approccio trifase per la conversione della potenza. In basso è riportato lo schema di un caricabatterie di questo tipo (Figura 1).
Raddrizzatore Vienna (per ricarica Livello 3)
Come analizzato nella sezione precedente, in molti casi la topologia per EVSE di Livello 3 è costituita da un raddrizzatore Vienna trifase. Questo tipo di raddrizzatore è un raddrizzatore unidirezionale, trifase, a modulazione di larghezza di impulso (PWM). Rispetto ad un raddrizzatore PWM di tipo boost, la topologia Vienna utilizza la commutazione multilivello (a tre livelli), che riduce il requisito del valore di induttanza e riduce della metà la sollecitazione di tensione sugli interruttori. In questo modo, migliorano l’efficienza e la densità di potenza.
Questo convertitore ha dimostrato di essere in grado di raggiungere un’efficienza del 99% o superiore.
[boris]
Tradizionalmente, i raddrizzatori Vienna utilizzano controller basati sull’isteresi che risultano più complessi da progettare. Solo di recente la PWM a base triangolare sinusoidale ha mostrato di funzionare per il controllo di raddrizzatori Vienna. Inoltre, con lo sviluppo di un modello di controllo a corrente media, l’adozione del raddrizzatore in applicazioni industriali e automotive ha vissuto un’accelerazione. Tuttavia, questo tipo di controllo può essere piuttosto impegnativo da progettare per via della necessità di circuiti multipli, regolazioni di precisione e commutazione a frequenze più elevate.
Esistono più tipologie di raddrizzatori Vienna, ma la più diffusa per le stazioni di ricarica di Livello 3 è la variante con collegamento a Y mostrata in Figura 2.
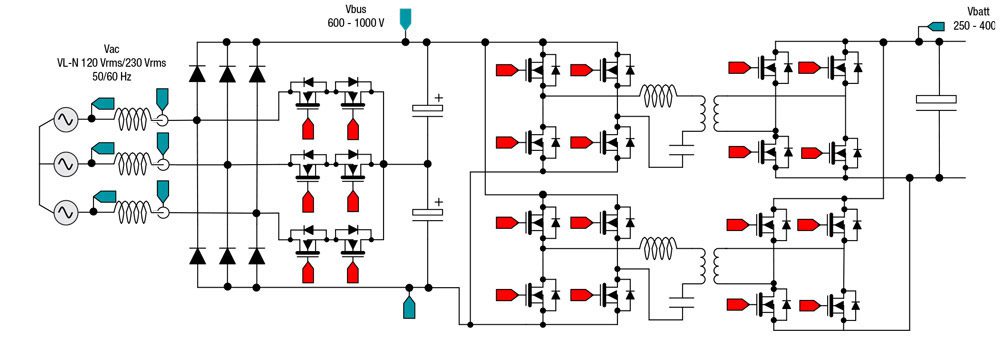
Figura 1. Topologie usate comunemente per stazioni di ricarica per veicoli elettrici (raddrizzatore Vienna trifase più LLC full-bridge).
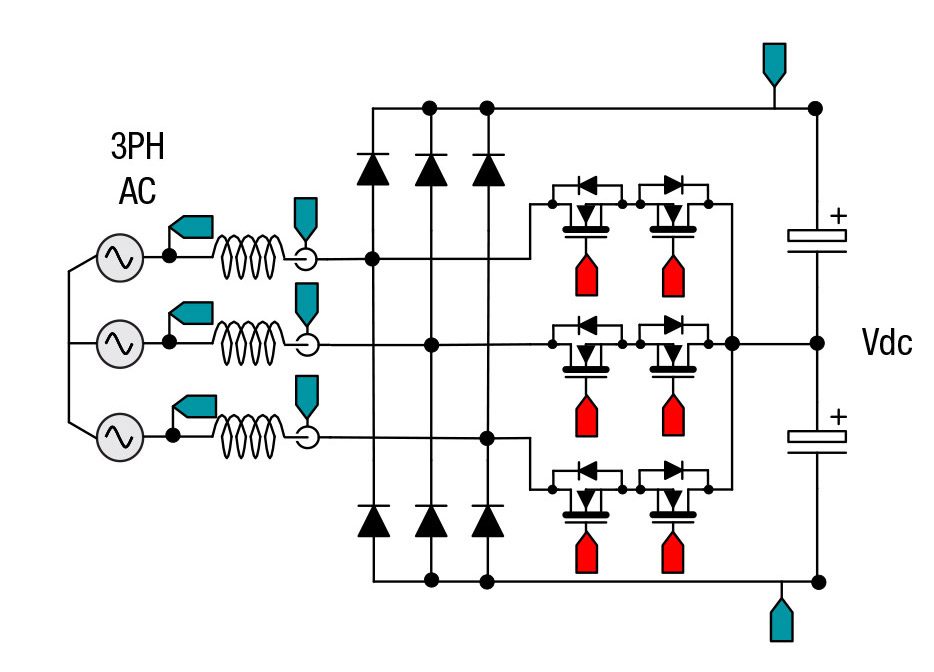
Figura 2. Raddrizzatore Vienna (collegamento a Y) per stazioni di ricarica per veicoli elettrici.
MCU in tempo reale C2000 per raddrizzatori Vienna
Le MCU in tempo reale C2000 sono controller progettati appositamente per applicazioni per l’elettronica di potenza. La TMS320F28004x è una valida scelta per le topologie di raddrizzatori Vienna mostrati in Figura 3 con caratteristiche dispositivo integrate e librerie software che permettono di ridurre le dimensioni, i costi e la difficoltà dello sviluppo di una topologia di raddrizzatori Vienna. Ad esempio:
L’azionamento dei segnali per il controllo dei dispositivi di alimentazione sul raddrizzatore Vienna può essere impegnativo, in particolare se le frequenze sono > 100 kHz per via dei vincoli dimensionali. La flessibilità all’interno del modulo PWM sulla MCU C2000 consente ai progettisti di generare facilmente questi segnali.
Il rilevamento dei segnali è un aspetto importante per ottenere un buon controllo: il rapido e preciso convertitore analogico-digitale sulla MCU C2000 permette un’elevata accuratezza di campionamento e misurazione, risultando in una migliore THDi , che è il dato tecnico fondamentale che deve essere soddisfatto dai convertitori PFC.
La protezione è un ulteriore aspetto da considerare nella progettazione del convertitore. Il sottosistema integrato del comparatore (CMPSS) integra la protezione da sovracorrente e sovratensione senza l’uso di circuiti esterni, riducendo quindi le dimensioni della scheda e i relativi costi. L’architettura flessibile X-Bar consente di combinare eventi di sgancio provenienti da fonti multiple, come CMPSS e GPIO, che segnalano anomalie nel driver del gate in modo nuovamente facile e veloce, senza bisogno di logica o circuiti esterni.
- Un’unità di elaborazione centrale (CPU) ottimizzata consente una veloce esecuzione del circuito di controllo. L’unità matematica trigonometrica (TMU) su chip accelera le operazioni trigonometriche, ottenendo maggiore velocità nell’esecuzione del circuito di controllo e riducendo i requisiti complessivi in termini di MIPS.
- Il Control Law Accelerator (CLA) è un core secondario che permette di alleggerire il carico delle attività di controllo sulla CPU principale (C28x), liberando quindi la larghezza di banda sulla MCU C28x per altre operazioni e attività. Inoltre, il CLA può essere utilizzato come unità di elaborazione parallela per eseguire più rapidamente il circuito di controllo, consentendo quindi un controllo a frequenza di commutazione più elevata sul raddrizzatore Vienna.
- Poiché i segnali in CA vengono rilevati per la tensione e la corrente, il primo passo per l’utilizzo di questi valori per il controllo consiste nella rimozione dell’offset in CC. La rimozione dell’offset in CC può essere un primo passaggio importante anche per i segnali non in CA per soddisfare i requisiti normativi per la tensione del sistema. L’ADC Post Processing Block (PPB) consente la rimozione automatica dell’offset del segnale rilevato nell’hardware. Questo permette al circuito di controllo di leggere direttamente un valore di registro firmato, risparmiando quindi i cicli utilizzati per caricare offset e togliendo offset dal percorso critico nell’Interrupt Service Routine (ISR).
- La regolazione dei circuiti di controllo è un’ulteriore difficoltà che i progettisti di sistema devono fronteggiare e può rappresentare un compito molto impegnativo in termini di tempo. TI ha sviluppato uno strumento detto SFRA (software frequency response analyzer) e lo strumento di progettazione per la compensazione in modo da facilitare la regolazione dei circuiti di controllo e velocizzare il processo di progettazione.
Integrazione analogica
La maggior parte dei convertitori elettronici di alimentazione deve essere protetta dagli eventi di sovracorrente. Un modo tipico per implementare questa protezione per un canale singolo è mostrato nella Figura 4. Poiché il raddrizzatore Vienna è una topologia di alimentazione trifase, necessita di più comparatori e riferimenti. Ad esempio, solo per implementare la protezione da corrente, potrebbero essere necessari 2 amplificatori operazionali, 6 comparatori e ulteriori resistenze e condensatori per implementare un semplice sgancio per sovracorrente per ciascuna delle tre fasi.
Le MCU C2000 come la TMS320F280049 possono rendere superflui tutti questi circuiti aggiuntivi. Questa MCU è dotata di comparatori a finestra su chip che fanno parte del CMPSS, collegati internamente al modulo PWM e che possono rendere possibile lo sgancio rapido del PWM. La TMS320F280049 consente di risparmiare spazio sulla scheda ed è conveniente a livello di applicazione finale in quanto permette di utilizzare queste risorse su chip ed evitare l’aggiunta di ulteriori componenti; vedere la Figura 6.
Nello sviluppo di un progetto per raddrizzatore Vienna, possono essere necessari fino a cinque CMPSS sulla MCU TMS320F280049: tre per il rilevamento della corrente su ciascuna delle tre fasi e due per il rilevamento sul bus in CC.
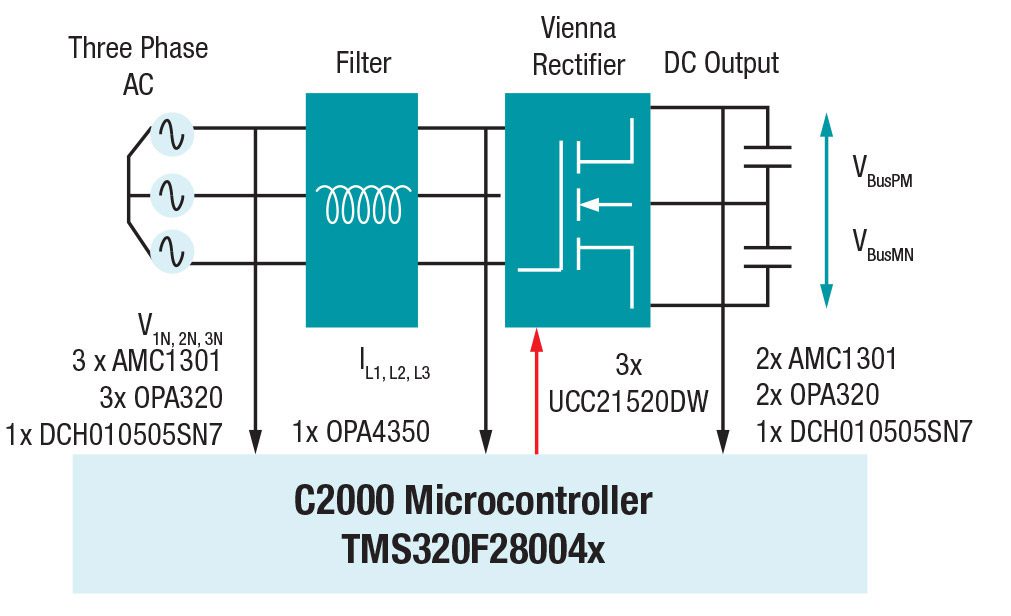
Figura 3. Schema a blocchi del raddrizzatore Vienna controllato dalla MCU C2000 TMS320F28004x in tempo reale.
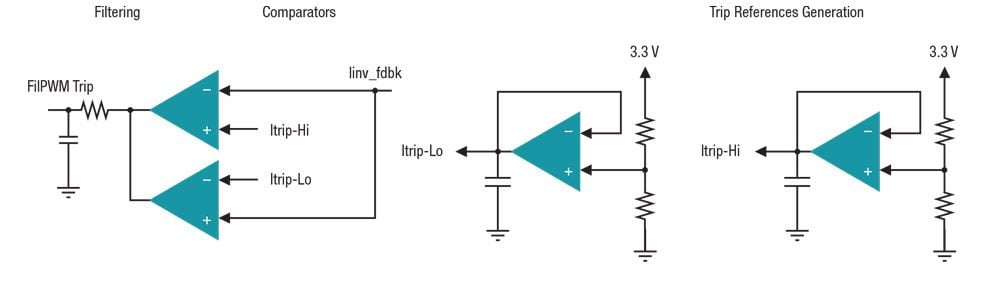
Figura 4. Generazione dello sgancio per PWM con l’utilizzo di comparatori e generatori di riferimento
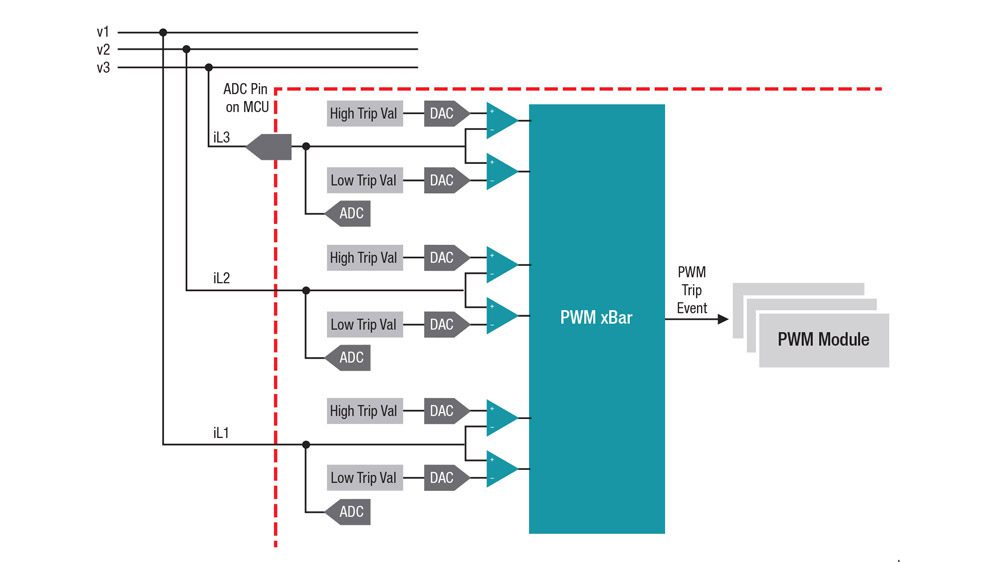
Figura 5. Schema di protezione da sovracorrente su raddrizzatore Vienna
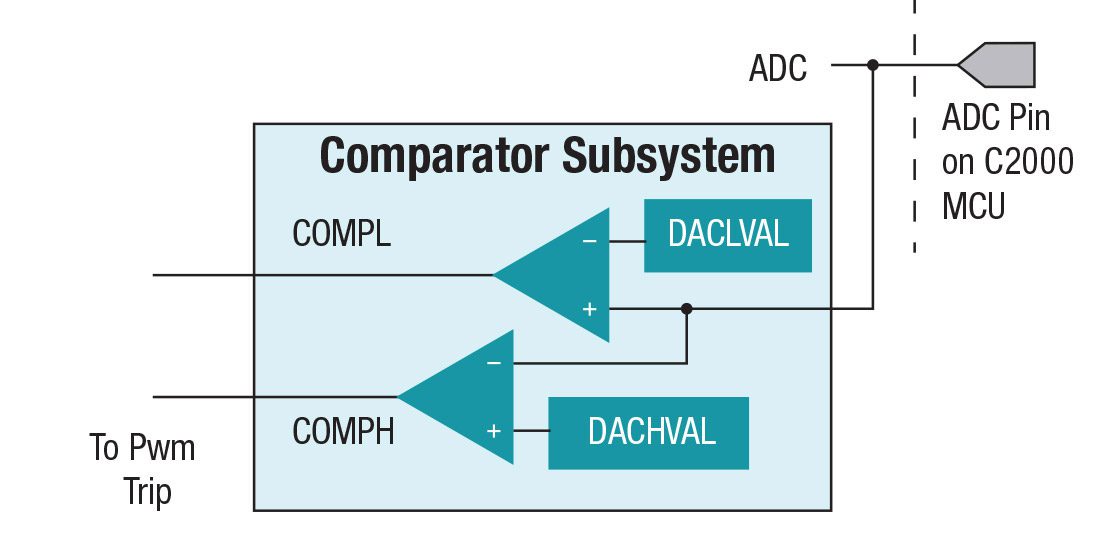
Figura 6. Il CMPSS utilizzato per la protezione da sovracorrente.
Accelerazione dell’esecuzione del circuito di controllo
La TMU F280049 è un set di istruzioni avanzato del core del processore di segnale digitale (DSP) C28x™ che aiuta ad eseguire in modo efficiente le operazioni trigonometriche e aritmetiche utilizzate normalmente in applicazioni per sistemi di controllo. Analogamente al set di istruzioni in virgola mobile, la TMU è un acceleratore matematico a virgola mobile IEEE-754 (Institute of Electrical and Electronics Engineers) in stretto accoppiamento con la CPU. Tuttavia, mentre l’unità a virgola mobile offre un supporto matematico in virgola mobile generico, la TMU si concentra sull’accelerazione di numerose operazioni matematiche trigonometriche specifiche che, altrimenti, richiederebbero numerosi cicli. Queste operazioni includono seno, coseno, arco tangente, divisione e radice quadrata, come mostrato in Figura 7.
Sono possibili più schemi di controllo per il raddrizzatore Vienna. In molti di questi schemi viene utilizzato un tipo di struttura di controllo con frame di riferimento rotante. Questi schemi utilizzano trasformazioni, ad es. da ABC a DQ0, e si basano pesantemente sul calcolo di valori per seno e coseno. Con le più rapide frequenze di commutazione nei raddrizzatori Vienna è ancora più importante calcolare queste routine velocemente. Ad esempio, rispetto alle MCU che dispongono solo di un’unità in virgola mobile, l’istruzione seno con il set di istruzioni TMU può eseguire un’istruzione «seno» in 4 cicli in pipeline, rispetto ad un massimo di 41 cicli. Si tratta di un miglioramento prestazionale di circa 10 volte per questo tipo di operazioni: la TMU presenta quindi un impatto significativo sugli algoritmi di controllo di un raddrizzatore Vienna. Inoltre, il blocco ADC PPB può risparmiare cicli incorporando la sottrazione dell’offset nell’hardware. Ad esempio, sul raddrizzatore Vienna, è necessario un minimo di 8 segnali da rilevare con sottrazione degli offset (3 tensioni per l’ingresso CA, 3 correnti per l’ingresso CA e 2 tensioni di uscita del bus). Le operazioni per la lettura di un singolo segnale richiedono la lettura dell’ADC, la lettura dell’offset, la sottrazione dell’offset, il ridimensionamento del risultato e la memorizzazione. Tutto ciò può richiedere fino a 12 cicli anche con un codice assembly ottimizzato. Con il PPB è possibile ridurre il tutto a 8 cicli, ottenendo un miglioramento del 33% nell’esecuzione di queste operazioni.
Il carico sulla CPU per il calcolo di un circuito di controllo di un raddrizzatore può richiedere anche un’approfondita lettura di 8 segnali (inoltre, il sovracampionamento può richiedere ancora più larghezza di banda della CPU), l’esecuzione di 4 controller e l’aggiornamento della PWM. Ad esempio, anche con la TMU e l’ADC PPB per un circuito di controllo a 50 kHz su un dispositivo a 100 MHz, il carico sulla CPU (C28x) è pari a ~47%, di cui il ~37% è per l’ISR del controllo principale (50 kHz) e il ~8,5% è per l’ISR della strumentazione (10 kHz).
Il CLA può consentire di alleggerire il carico di queste ISR dal core C28x. Il CLA (tipo 1) sulla serie TMS320F2837x può alleggerire il carico dell’ISR più veloce, mentre il CLA (tipo 2) sulla F28004x può alleggerire il carico di entrambe le ISR riducendo quindi l’uso della CPU C28x a zero.
Il CLA può permettere di realizzare i circuiti di controllo per raddrizzatori Vienna fino a 200 kHz utilizzando l’elaborazione in parallelo su dispositivi a 100 MHz come il F280049. Con un dispositivo >200 MHz come la serie TMS320F2837x, sono realizzabili frequenze del circuito di controllo fino a 400 kHz mantenendo il codice dell’algoritmo di controllo in C. Inoltre, con il codice assembly, è possibile ottenere frequenze del circuito di controllo ancora superiori con MCU C2000 in tempo reale.
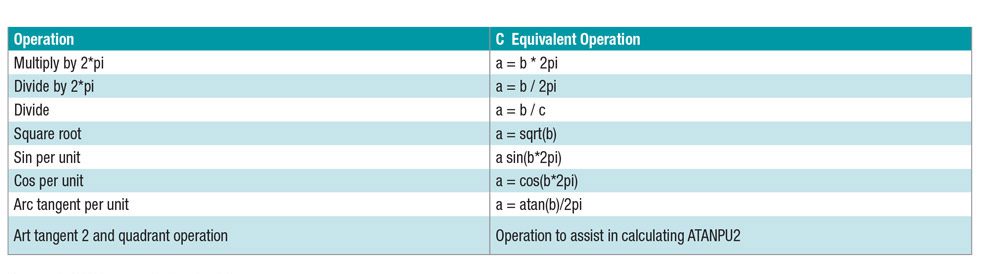
Figura 7. Riepilogo delle istruzioni supportate dalla TMU.
Facilità di regolazione dei circuiti di controllo
L’SFRA (software frequency response analyzer) è uno dei tre strumenti inclusi nella suite di strumenti software per la progettazione di alimentazioni digitali powerSUITE per MCU C2000. L’SFRA include una libreria software che permette di misurare rapidamente la risposta in frequenza dei circuiti di controllo della tensione e della corrente del convertitore di potenza digitale. La libreria SFRA contiene funzioni software che iniettano una frequenza nel circuito di controllo e misurano la risposta del sistema utilizzando il convertitore analogico/digitale (ADC) su chip della MCU C2000. Questo processo fornisce caratteristiche di risposta in frequenza e la risposta in frequenza del guadagno ad anello aperto del sistema ad anello chiuso del raddrizzatore Vienna.
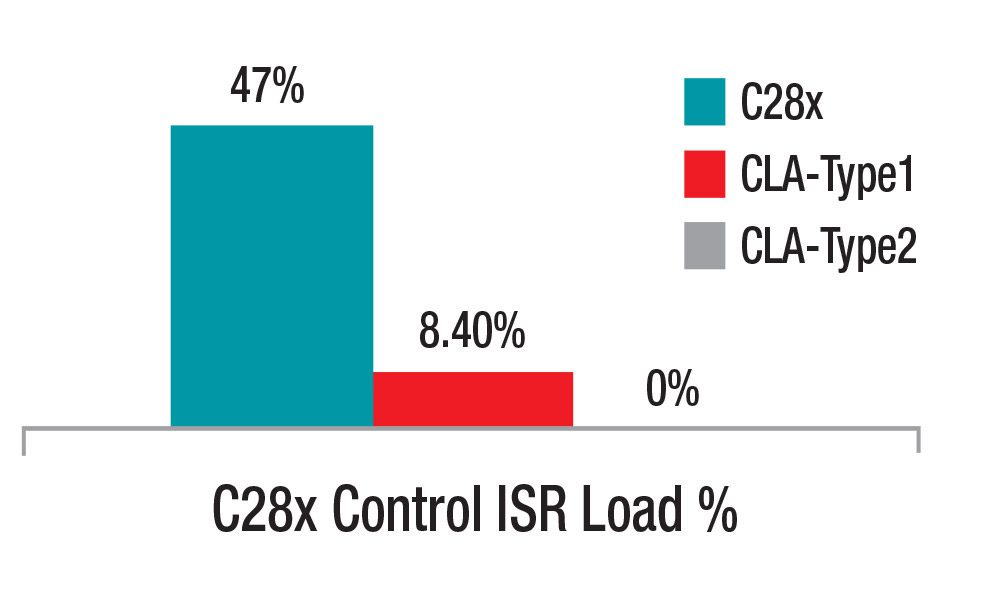
Figura 8. Carico della CPU C28x per algoritmo di controllo Vienna, senza CLA, con CLA-1, con CLA-2
È quindi possibile visualizzare la risposta in frequenza del guadagno ad anello aperto su un’interfaccia grafica utente (GUI) basata su PC. Tutti i dati della risposta in frequenza sono esportati in un file CSV (comma-separated values) oppure, in alternativa, sotto forma di foglio di calcolo Excel, che è poi possibile utilizzare per progettare il circuito di compensazione con il Compensation Designer. Il vantaggio in questo caso è che non è necessario utilizzare un analizzatore di risposta hardware che richiede ulteriore tempo per l’impostazione e per prendere le misurazioni. È possibile impostare il raddrizzatore Vienna completamente tramite software. In basso, la Figura 9 mostra l’interfaccia grafica per la GUI del Software Frequency Response Analyzer dove è possibile misurare la larghezza di banda, il margine di guadagno e il margine di fase a partire da una scansione di frequenza.
LLC risonante interlacciato a due fasi (per la ricarica di Livello 3)
In molti casi, la topologia per l’EVSE isolato in CC/CC per Livello 3 è un LLC risonante full-bridge interlacciato a due fasi. Le elevate prestazioni dell’LLC full-bridge (efficienza, densità di potenza ecc.) rispondono ai requisiti di varie classi di potenza di CCS (combined charging system) tra 300 V e 1000 V, rendendo questi convertitori una valida scelta per applicazioni ad alta potenza. In basso è riportato lo schema di uno stadio LLC full-bridge.
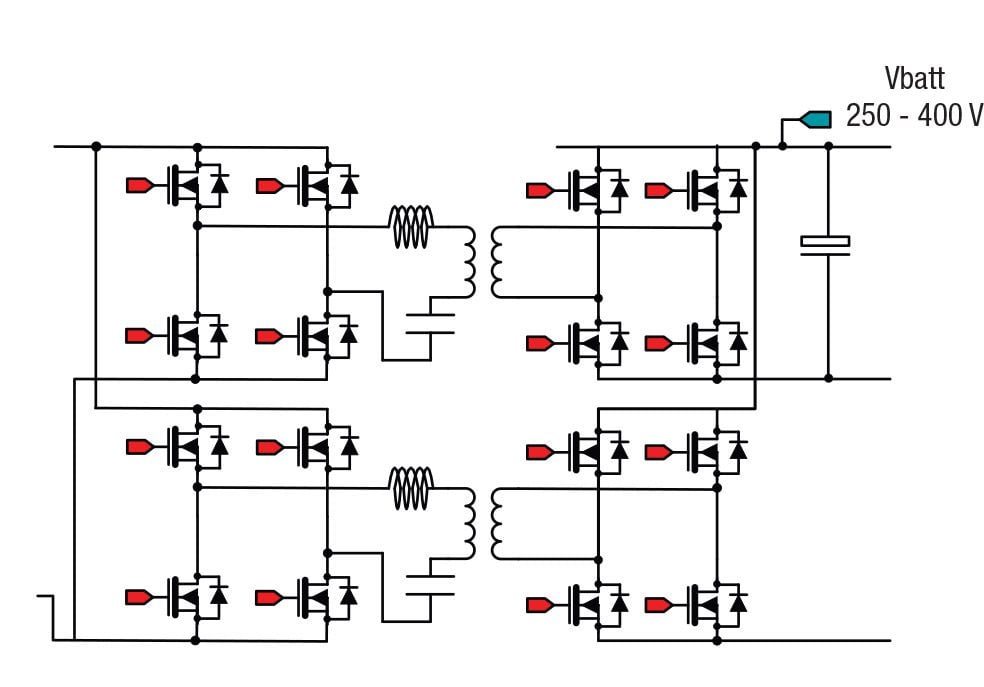
Figura 9. Topologia LLC full-bridge risonante.
MCU C2000 in tempo reale MCU per LLC risonante full-bridge interlacciato
È possibile utilizzare anche le MCU TMS320F28004x per topologie LLC interlacciate full-bridge con la più recente generazione (la quarta) del modulo PWM di MCU C2000, che dispone di due funzionalità principali per migliorare l’efficienza di un LLC full-bridge:
- Reload globale one-shot per la generazione di forme d’onda PWM interlacciate a frequenza variabile.
- Bilanciamento della corrente tra fasi interlacciate
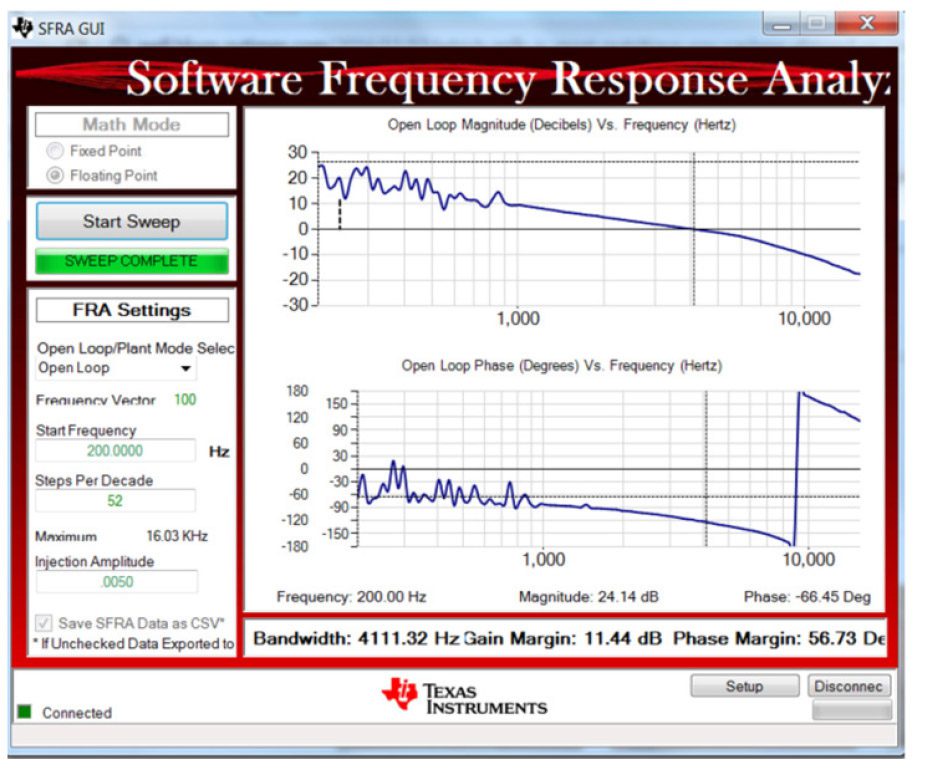
Figura 10. SFRA gira su un anello chiuso.
Generazione della forma d’onda PWM per frequenza variabile
I convertitori LLC risonanti sono convertitori a frequenza variabile, nei quali la frequenza di esercizio per la commutazione PWM cambia spesso durante l’esecuzione. Per un funzionamento affidabile, il cambiamento delle frequenze non deve produrre glitch o comportamenti irregolari nella PWM. Per applicazioni con elevate correnti di uscita che richiedono l’isolamento fra ingresso e uscita, è pratica comune utilizzare la rettificazione sincrona (SR) sul lato secondario del trasformatore di isolamento. La SR utilizza dispositivi elettronici di alimentazione supplementari che commutano a frequenze variabili.
Le stazioni di ricarica di Livello 3 richiedono convertitori interlacciati multifase. Questi convertitori interlacciati presentano ancora più dispositivi che commutano a frequenze variabili e richiedono relazioni in fase fissa fra varie fasi in tutte le frequenze operative. Garantire una corretta generazione della forma d’onda PWM con frequenze variabili in tutte le condizioni operative è una grande sfida per il controller in quanto il tempo sicuro per l’aggiornamento dei parametri PWM si riduce all’aumentare delle frequenze di commutazione o del numero di incrementi di fasi interlacciate. Inoltre, in caso di interlacciamento di più fasi di convertitori risonanti, è fondamentale garantire che il progetto includa il bilanciamento della corrente di fase ad alta precisione. Un bilanciamento della corrente inadeguato o non implementato correttamente o una generazione errata della forma d’onda PWM possono causare un guasto del convertitore e notevoli danni al sistema o ai componenti.
La Figura 11 mostra come è possibile mancare un aggiornamento del periodo PWM, che va a causare un guasto al convertitore. L’implementazione C2000 di un reload globale one-shot è un meccanismo fondamentale per garantire che la generazione della forma d’onda PWM avvenga correttamente. Il reload globale one-shot garantisce che tutti gli aggiornamenti di servizio, fase e banda morta abbiano effetto nel ciclo di commutazione in cui è necessaria la nuova frequenza. Ciò fornisce una transizione netta da una frequenza all’altra per tutte le fasi. Al contrario, utilizzando un timer per uso generico senza una funzione di reload globale one-shot, la frequenza di commutazione massima sarà limitata a causa del maggior numero di cicli necessari per evitare problemi di sincronizzazione di fase. Anche questo aspetto diventa sempre più difficile a mano a mano che vengono aggiunte più fasi.
Per fare un esempio, ipotizzando che tutti i moduli PWM debbano essere sempre in fase l’uno con l’altro, se sono presenti 16 uscite PWM e se vengono utilizzati tutti i registri di reload globali, è possibile ottenere un potenziale risparmio di cicli, cruciale in termini di tempo, pari a 142 cicli. Il numero esatto di cicli risparmiati dipende dall’uso. Questo risparmio in termini di cicli consente di ottenere frequenze di commutazione più elevate.
Bilanciamento della corrente di fase
In caso di interlacciamento di due o più convertitori LLC full-bridge identici, eventuali differenze nei loro circuiti serbatoio porteranno a un bilanciamento diseguale della corrente di carico tra le singole fasi. Un bilanciamento diseguale del carico è un grave problema nei convertitori risonanti interlacciati perché riduce l’efficienza, l’affidabilità e la stabilità termica del sistema. Ciò può causare correnti ad elevata circolazione, una maggiore corrente di ripple nel condensatore di uscita e persino un guasto del convertitore con notevoli danni al sistema. Poiché anche piccole differenze rispetto alle tolleranze dei componenti possono portare a notevoli squilibri tra le fasi, tutti i convertitori risonanti interlacciati devono poter condividere e bilanciare la corrente tra le singole fasi per garantire un funzionamento sicuro, affidabile ed efficiente.
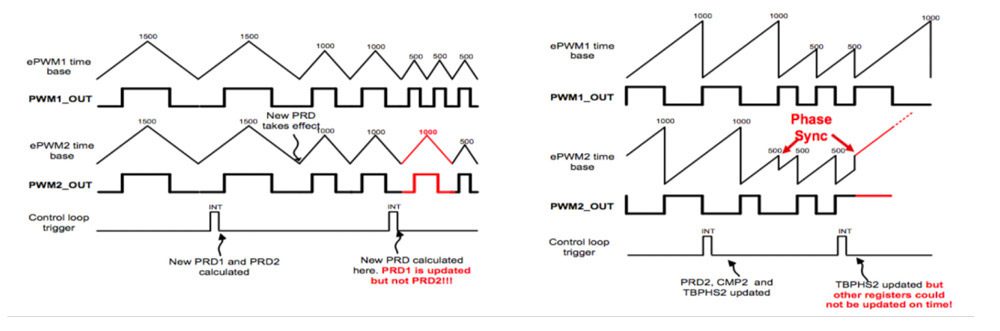
Figura 11. Sfide per la generazione di forme d’onda PWM a frequenza variabile.
Una soluzione consiste nel progettare il circuito serbatoio con tolleranze estremamente strette; tuttavia, questa progettazione comporta un aumento considerevole dei costi di sistema. Inoltre, come accennato in precedenza, anche differenze minime rispetto alle tolleranze possono portare comunque a squilibri tra le fasi. Sebbene questa soluzione possa funzionare per alcune applicazioni, è poco pratica per la maggior parte dei sistemi. Alcune soluzioni cercano di abbinare i circuiti serbatoio in diverse fasi aggiungendo più componenti reattivi ai circuiti serbatoio in alcune o tutte le fasi, ma questa soluzione comporta anche alcuni lati negativi. Oltre ad aumentare i costi e le dimensioni del sistema, questa soluzione può far salire anche i costi di produzione, se si rende necessario un ulteriore taglio sulla catena di montaggio. Recenti proposte fanno compiere un ulteriore passo avanti a questo approccio cercando di abbinare i circuiti serbatoio durante il funzionamento, aggiungendo più interruttori elettronici di potenza per commutare ulteriori induttanze o capacità dentro e fuori il circuito serbatoio per alcune fasi o per tutte le fasi. Questo approccio fornisce un buon metodo per regolare con precisione i circuiti serbatoio, ma a scapito di un aumento di costi, dimensioni, complessità del sistema e di una possibile riduzione dell’efficienza del sistema.
Altre proposte aggiungono ulteriori convertitori basati su un avvolgimento secondario aggiuntivo su alcuni o su tutti i trasformatori LLC. Il funzionamento di questo convertitore aggiuntivo viene quindi gestito in modo da compensare la corrente aggiuntiva trasportata dalle altre fasi. Questo metodo presenta gli stessi inconvenienti di quelli discussi sopra e va inoltre ad aumentare la complessità nella progettazione del trasformatore.
La MCU TMSF28004x è in grado di implementare tecniche di bilanciamento della corrente o di fase nel software senza la necessità di ulteriori componenti o circuiti esterni. Questo nuovo tipo di progetto è un ulteriore esempio dei vantaggi offerti dai moduli PWM altamente configurabili della MCU C2000. In questa implementazione, un circuito di bilanciamento della corrente nel software riduce adeguatamente il duty cycle PWM per gli interruttori nella fase che portano una corrente di carico più elevata. Inoltre, il controller regola anche la temporizzazione PWM per i corrispondenti interruttori SR in quella fase.
La MCU C2000 TMS320F280049
La F28004x è una nuova serie della famiglia di MCU C2000 (Figura 12), progettata specificamente per applicazioni di gestione dell’alimentazione. La serie F28004x comprende:
- Prestazioni della CPU a 100 MHz con l’opzione di un ulteriore co-processore CLA (control law accelerator) a 100 MHz di ultima generazione.
- Acceleratori avanzati di controllo in tempo reale tra cui TMU, unità a virgola mobile e unità complessa di Viterbi.
- Fino a sette moduli CMPSS integrati.
- Tre ADC ad alte prestazioni con un blocco di post-elaborazione, amplificatori di guadagno programmabili e un sottosistema comparatore flessibile.
- Timer flessibili: moduli per modulatori di larghezza di impulso avanzati (ePWM) di quarta generazione con risoluzione a 150 ps, generazione di forme d’onda complesse e capacità di sincronizzazione avanzata.
- Fino a 256 KB di memoria flash integrata
- 100 KB di memoria ad accesso casuale (RAM) ad alta velocità.
Raddrizzatore Vienna basato su MCU C2000 e progetto di riferimento per LLC CC/CC interlacciato
Per ulteriori informazioni sull’implementazione di un raddrizzatore Vienna e di un convertitore CC/CC isolato risonante interlacciato nei moduli di alimentazione per stazioni di ricarica basati su MCU C2000 in tempo reale, vedere il Progetto di riferimento per la correzione del fattore di potenza trifase basato su raddrizzatore Vienna con utilizzo di MCU C2000 e il Progetto di riferimento per convertitore risonante LLC interlacciato bifase con utilizzo di MCU C2000. Quest’ultimo progetto si basa su un half-bridge, ma è possibile applicare molte tecniche utilizzate in tale progetto di riferimento in un’implementazione full-bridge.
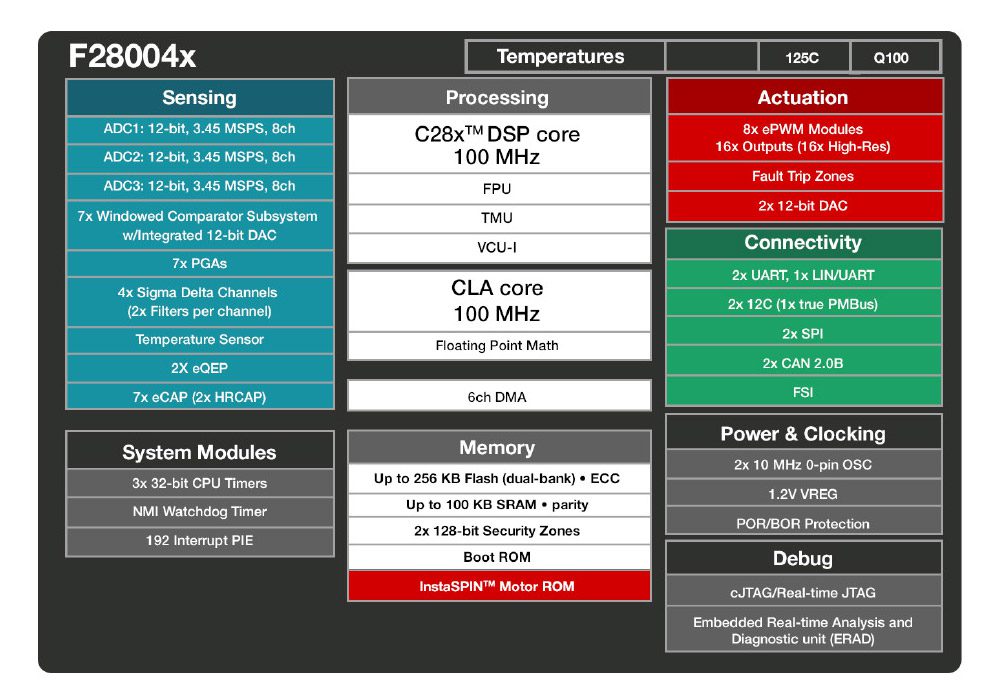
Figura 12. La nuova serie C2000 F28004x
[/boris]
Conclusione
Con l’aumentare della richiesta di stazioni di ricarica in CC di Livello 3 di potenza superiore, le topologie come il raddrizzatore Vienna con LLC interlacciato CC/CC per implementare la conversione trifase da CA a CC ad alta efficienza diventeranno sempre più fondamentali. La nuova serie di microcontroller in tempo reale F28004x di C2000 va ad ampliare la vasta gamma di soluzioni ottimali di C2000 che aiutano gli ingegneri a risolvere le sfide di progettazione relative a questi progetti evidenziate in questo documento e in altre topologie di alimentazione avanzate.
A cura di: Sang Chon, C2000™ MCU Automotive Marketing Manager, Texas Instruments; Manish Bhardwaj, C2000 MCU Digital Power Applications Engineer, Texas Instruments, Hrishi Nene, C2000 MCU Digital Power Applications Engineer, Texas Instruments.