Non ci sono prodotti a carrello.

I LED driver per impiego automobilistico migliorano ulteriormente le prestazioni dei sistemi di illuminazione interna ed esterna delle moderne autovetture.
I LED per automotive hanno conquistato l’industria grazie alla loro versatilità ed efficienza. Nelle applicazioni di illuminazione automobilistica, i LED alimentano i fari delle automobili, i fanali posteriori e in sostanza tutto ciò per cui sono utili dentro e fuori dall’abitacolo in termini funzionali e di stile. I diodi a infrarossi (IR) sono utilizzati nei sistemi di monitoraggio del conducente (DMS). I display di navigazione GPS e di intrattenimento in cabina utilizzano stringhe di LED per la retroilluminazione.
Queste applicazioni a LED devono essere abbastanza piccole ed efficienti da adattarsi allo spazio esistente senza surriscaldarsi. Con così tante funzioni diverse, ci si potrebbe aspettare che i produttori automobilistici siano rassegnati ad immagazzinare una grande quantità di tipi diversi di driver LED per automobili. Ciò potrebbe avere gravi implicazioni in termini di ridotto potere d’acquisto a causa del basso volume di ordini, cicli di progettazione più lunghi e tempi di immissione sul mercato più lenti.
È possibile avere un driver LED per automotive efficiente e altamente integrato che sia abbastanza flessibile da coprire la maggior parte di queste applicazioni? Questo articolo esamina i requisiti di alimentazione di tre classi di applicazioni di illuminazione a LED e indica la topologia del driver LED ottimale per ciascun caso (buck, boost, buck-boost). Quindi introduce una soluzione innovativa per far fronte alle sfide di integrazione, efficienza e flessibilità.
Applicazioni luminose in cabina
Le applicazioni all’interno dell’abitacolo come le luci della plafoniera e di cortesia, compresi i sistemi di monitoraggio del conducente, richiedono uno o due diodi LED per il funzionamento. Per un tipico diodo LED che sviluppa 3,5 V a 1 A, questo tipo di applicazione può essere ben servito da un semplice convertitore buck. Nella Figura 2, la corrente dell’induttore del convertitore buck si accumula quando N1 è “acceso” e viene mantenuta “accesa” tramite N2 quando N1 è “spento”. La rettifica sincrona consente l’elevata efficienza.
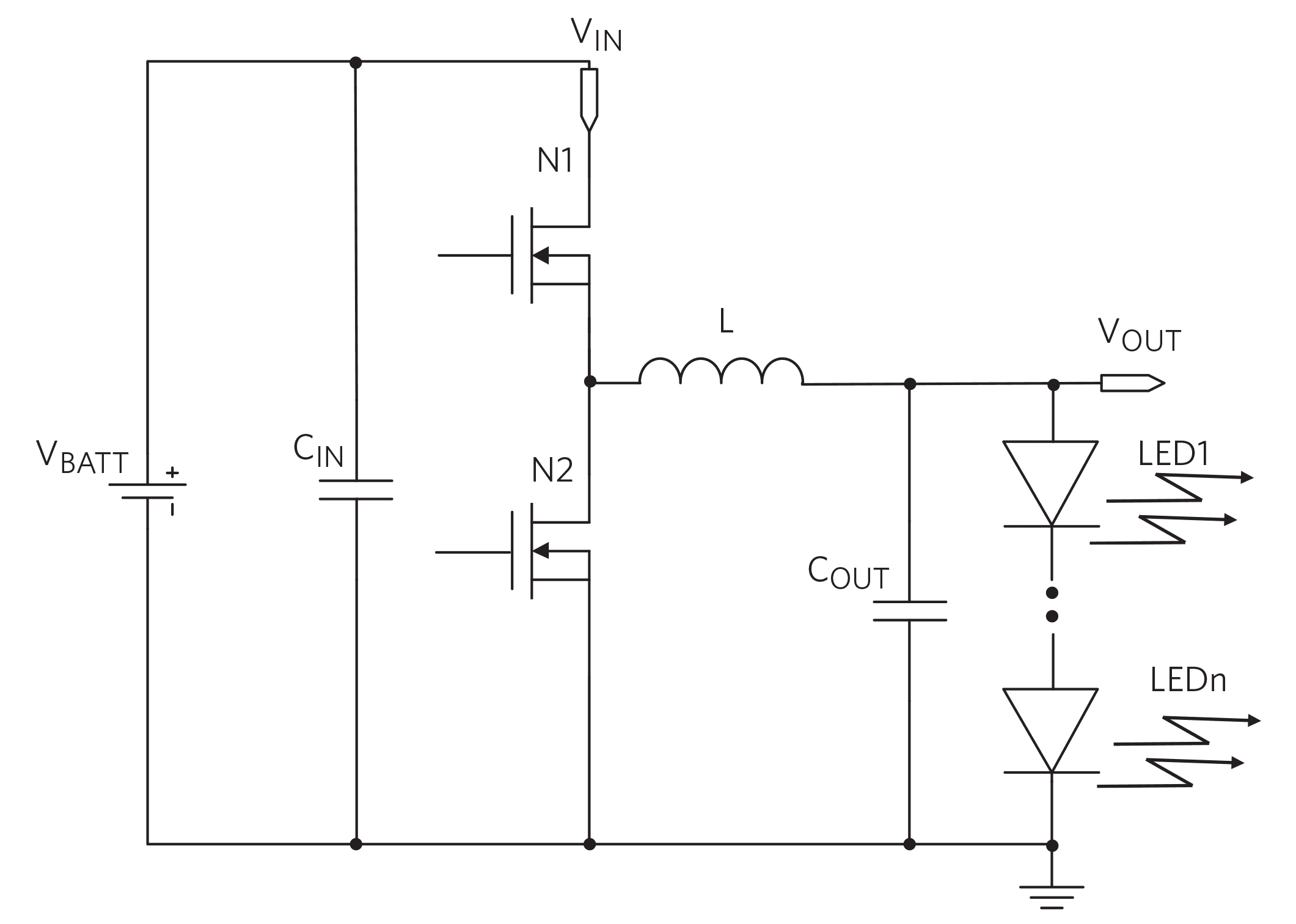
Figura 2. Convertitore buck in una tipica configurazione driver LED.
Applicazioni esterne e di segnalazione
Le luci di marcia diurna, i fanali posteriori, i fendinebbia e gli indicatori di direzione richiedono almeno tre o quattro luci a LED per funzionare. Qui, la tensione varia da 10,5 V a 14 V. Con la batteria dell’auto che varia da meno di 6 V (avviamento a freddo) a 16 V, la migliore configurazione per questo tipo di applicazione è un convertitore buck-boost. Un esempio di implementazione buck-boost derivata da quella buck è mostrata nella Figura 3. Notare come la tensione di uscita è sempre al di sotto della massa. L’induttore accumula corrente quando N1 è “acceso” e viene alimentato attraverso N2 quando N1 è “spento”. La tensione attraverso l’induttore si inverte ad ogni transizione, indipendentemente dal numero di diodi. Di conseguenza, questa configurazione può funzionare con qualsiasi numero di diodi sull’uscita e una caduta di tensione della stringa che raggiunge un valore superiore o inferiore alla tensione di ingresso (operazione buck-boost).
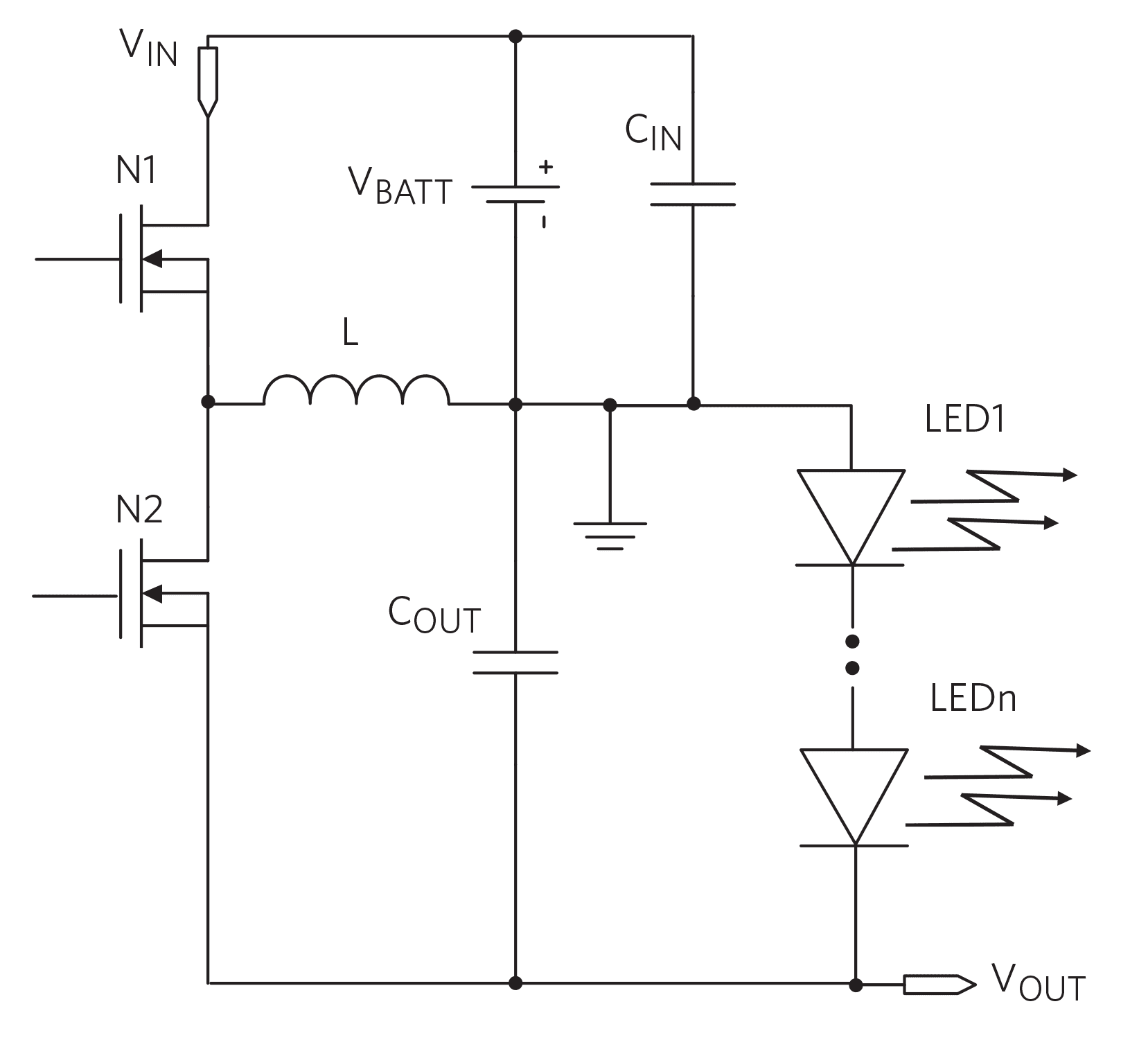
Figura 3. Operazione Buck-Boost di derivazione Buck.
Fari a bassa/media potenza e applicazioni di visualizzazione in cabina
I fari a bassa/media potenza, abbaglianti e anabbaglianti, nonché i display in cabina per la navigazione GPS e l’intrattenimento, richiedono lunghe stringhe di diodi. Per questa applicazione, la migliore configurazione è il convertitore boost. Nel convertitore boost di derivazione buck di Figura 4, la tensione di uscita “galleggia” al di sotto della tensione di ingresso. L’induttore accumula corrente quando N1 è “acceso” ed è alimentato attraverso N2 quando N1 è “spento”. Per far sì che la tensione attraverso l’induttore si inverta ad ogni transizione, il numero di diodi deve essere abbastanza alto da rendere negativa la tensione di uscita rispetto alla terra. Per questo motivo, la configurazione può funzionare solo con un numero elevato di diodi nella stringa, in questo caso 8 (stringa da 28 V).
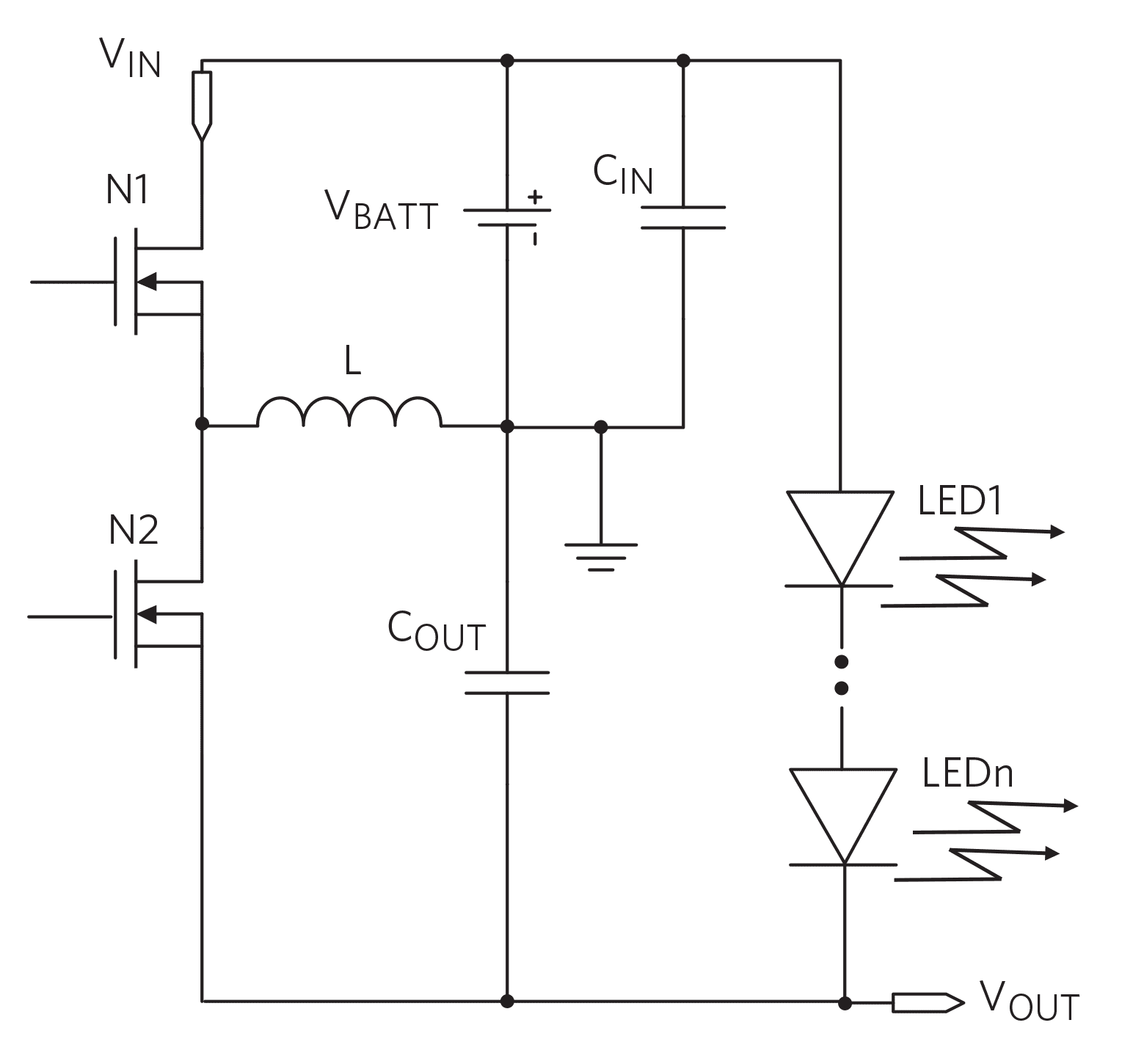
Figura 4. Operazione Boost di derivazione Buck.
Una soluzione completa
Le implementazioni canoniche buck, boost e buck-boost possono essere molto diverse e molto difficili da conciliare in un singolo IC. Tuttavia, nelle applicazioni LED per autoveicoli non fa alcuna differenza a quale tensione faccia riferimento la stringa. Ciò offre l’opportunità di adottare una topologia di derivazione buck sia per il convertitore buck-boost che boost. Nei tre esempi precedenti, il catodo del diodo inferiore del LED è opportunisticamente riferito a terra (buck) o a VOUT (buck-boost e boost) mentre l’anodo del diodo superiore del LED è riferito a VOUT (buck) o a terra (buck-boost e boost). In effetti, in questa applicazione è possibile avere un’unica flessibile topologia per tutti i casi, con lievi aggiustamenti dell’IC e della configurazione dell’applicazione.
Soluzione integrata e flessibile
L’IC in Figura 5 è un driver LED completamente sincrono che fornisce una corrente di uscita costante per pilotare LED ad alta potenza. L’IC integra due MOSFET di potenza da 60 mΩ per un funzionamento sincrono, ad alta efficienza e con un numero minimo di componenti esterni. La configurazione flessibile supporta la conversione buck, buck-boost invertente e boost. I dispositivi possono funzionare in due modalità. Per la modalità buck, basta collegare una resistenza da 2,49 kΩ tra VCC e il pin PWMFRQ. Per la modalità buck-boost o boost, basta collegare una resistenza da 17,8 kΩ tra VCC e il pin PWMFRQ.
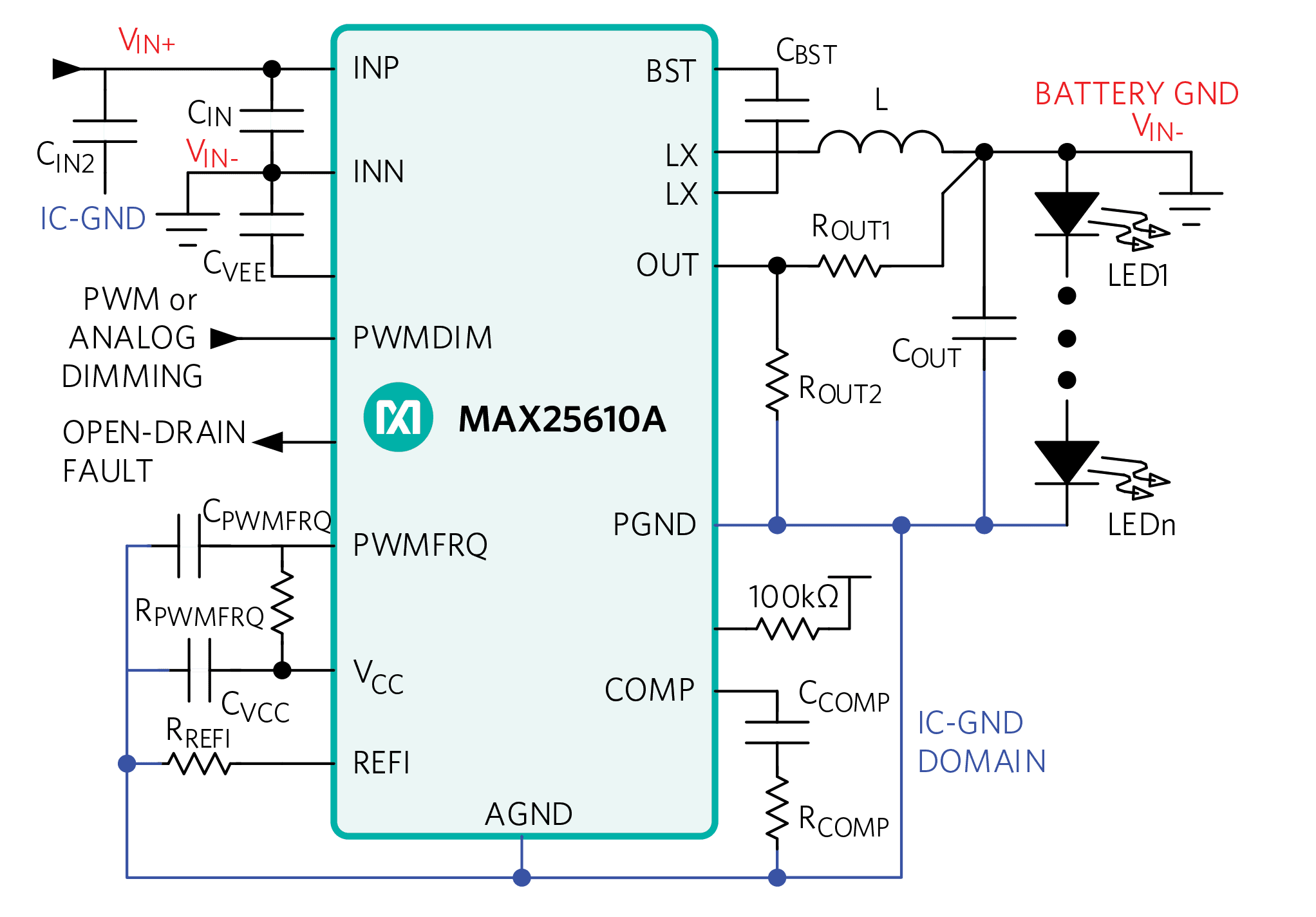
Figura 5. Convertitore, integrato e flessibile, in modalità Buck-Boost.
Dimmeraggio flessibile
Il driver LED offre un pin di ingresso analogico di controllo dimmer (REFI) mentre la tensione su REFI imposta il livello di corrente del LED in modo lineare da zero fino ad un massimo quando VREFI = 1.3V.
Inoltre, il dispositivo offre un dimmeraggio PWM. PWMDIM funziona con segnali di controllo analogici o PWM. Una volta che il rilevatore di impulsi interno rileva tre fronti successivi di un segnale PWM con una certa frequenza, il dispositivo si sincronizza con il segnale esterno e modula con larghezza d’impulso la corrente del LED alla frequenza e duty cycle dell’ingresso esterno PWMDIM. Se un segnale di controllo analogico viene applicato a PWMDIM, il dispositivo confronta l’ingresso CC con una rampa generata internamente a 200Hz per modulare con larghezza d’impulso la corrente del LED.
Una funzionalità integrata di rilevamento della corrente consente di risparmiare sull’uso di un resistore di rilevamento esterno, riducendo lo spazio e i costi del PCB. I MOSFET integrati consentono fronti di transizione ben controllati, riducendo al minimo le interferenze elettromagnetiche. Lo spread spectrum integrato consente un’ulteriore riduzione del rumore EMI. L’IC è offerto in un SWTQFN da 5 mm x 5 mm a 16 pin e in un package TSSOP da 5 mm x 6,4 mm.
Conclusione
L’elevato numero di applicazioni LED nelle automobili moderne crea problemi di spazio, che richiedono alta integrazione e alta efficienza. L’ampia varietà di applicazioni LED può creare problemi come il ridotto potere d’acquisto dovuto a volumi ridotti, cicli di progettazione più lunghi e tempi di immissione sul mercato più lunghi. Il MAX25610 è un driver LED automobilistico flessibile e altamente integrato che può essere facilmente configurato per implementare topologie buck, buck-boost e boost, coprendo così un’ampia classe di applicazioni LED per autoveicoli. I MOSFET di potenza a bordo con bassa RDS(ON) supportano il funzionamento sincrono, riducono lo spazio del PCB e producono un’alta efficienza per una generazione di calore inferiore. Questo innovativo IC driver LED risolve le sfide di spazio, volumi di acquisto e tempi di ciclo.
Approfondimenti
MAX25610A Synchronous Buck and Buck-Boost LED Driver DC-DC Converter
MAX25610B Synchronous Buck and Buck-Boost LED Driver DC-DC Converter
Qui ulteriori Design Solutions
Bio Autori:
Nazzareno (Reno) Rossetti, è un autore con diversi brevetti nel settore. Ha conseguito un dottorato in Ingegneria Elettronica presso il Politecnico di Torino, Italia.
Yin Wu, MBA, MSEE in Maxim Integrated, è un professionista del settore dei semiconduttori. Ha conseguito un Master in Business Administration presso l’Università Santa Clara e un master in Ingegneria elettrica presso la San Jose State University.