Non ci sono prodotti a carrello.
LoRa Edge è la rivoluzionaria tecnologia introdotta da Semtech per localizzare qualsiasi dispositivo IoT utilizzando le reti GNSS e Wi-Fi, ma mantenendo praticamente inalterati i consumi e l’autonomia dei dispositivi.
La geolocalizzazione è una delle applicazioni Internet of Things (IoT) più avvincenti e in rapida crescita. Le dimensioni del mercato previste per “Geo IoT” dovrebbero raggiungere i 74 miliardi di dollari entro la fine del 2025 dal suo valore attuale di 40 miliardi, secondo Market Insight Reports.
Si stima che il valore delle merci perdute solamente negli Stati Uniti durante il trasporto per furti o smarrimenti raggiunga i 50 miliardi di dollari.
Una soluzione promettente nei confronti di furto e di perdita di beni di valore si presenta sotto forma di tecnologia di geolocalizzazione, che ha guadagnato popolarità in tutto il mondo per la sua capacità di registrare e tenere traccia dei beni.
Una varietà di settori come i trasporti e la logistica, i servizi sanitari e alimentari stanno sostituendo i sistemi di controllo proprietari con soluzioni di gestione delle risorse di geolocalizzazione per localizzare, tracciare e monitorare prodotti, attrezzature, veicoli e persone.
Implementando soluzioni connesse, le aziende possono sostituire i processi manuali inefficienti e onerosi con soluzioni di gestione delle risorse abilitate per l’IoT. I dispositivi dotati di geolocalizzazione portano la gestione delle risorse, sia che si tratti di risorse fisse o mobili, per ottimizzare ulteriormente i processi operativi e abilitare nuove funzionalità come la prevenzione di perdite e danni alle merci. La geolocalizzazione in ogni dispositivo può ridurre significativamente il TCO (Total Cost of Ownership) per qualsiasi azienda, edificio intelligente, campus o città intelligente che cerca di implementare sensori e tracker.
Barriere per la geolocalizzazione
Dal momento che ha perfettamente senso poter tracciare qualsiasi dispositivo IoT, perché ogni dispositivo connesso non include e utilizza la funzionalità di geolocalizzazione?
Essenzialmente per il costo, ancora relativamente elevato, delle tecnologie GPS tradizionali che consentono la geolocalizzazione e che hanno confini tecnici che impediscono il successo dell’implementazione. I seguenti fattori hanno impedito l’ampia adozione del tracciamento delle risorse di geolocalizzazione in numerosi settori IoT:
– Durata della batteria
L’elevato consumo di energia dei tradizionali localizzatori GPS richiede la sostituzione delle batterie più volte all’anno. In alcuni casi, gli asset tracker si trovano in aree difficili da raggiungere, come piattaforme petrolifere e di gas o montati su flotte di veicoli. Queste implementazioni rendono molto costoso cambiare le batterie, specialmente se ce ne sono migliaia schierate sul campo.
– Installazione
Quando si implementa l’IoT, è facile commettere errori. Il processo di registrazione manuale durante l’installazione dei sensori in un edificio, ad esempio, è soggetto a errori umani. Inoltre, i tracker possono essere spostati da una posizione all’altra senza che i registri vengano aggiornati manualmente.
– Manutenzione
Come per qualsiasi apparecchiatura, tra cinque, 10 o anche 20 anni, un tecnico verrà inviato a riparare il dispositivo. I tracker di risorse vengono spesso persi a causa della batteria scarica senza notifica o dei cambiamenti nella proprietà aziendale.
– Costo elevato
Con quale frequenza una soluzione deve effettivamente controllare la posizione di un dispositivo? Minuto per minuto? Una volta al giorno? In molti casi, la tecnologia GPS tradizionale è eccessiva in quanto la frequenza del check-in è direttamente correlata alle spese e all’utilizzo della batteria.
Gestione degli asset IoT economica e semplificata
Semtech ha lavorato per superare questi ostacoli con soluzioni innovative basati su LoRa.
Non sarebbe bello avere la geolocalizzazione come servizio nativo su qualsiasi tipo di dispositivo connesso che potrebbe essere mappato automaticamente? Non sarebbe meglio se ci fosse una soluzione con una durata della batteria fino a 10 volte maggiore rispetto alle soluzioni cellulari esistenti?
Ecco dunque la soluzione Lora Edge di Semtech.
Ma procediamo con ordine.
Geolocalizzazione
Come descritto nel whitepaper LoRa Alliance Geolocation Whitepaper pubblicata dalla LoRa Alliance, LoRaWAN fornisce teoricamente la funzionalità di geolocalizzazione nativa che è supportata da ogni tipo di nodo senza richiedere ulteriore potenza di calcolo.
Sono disponibili due metodologie per la geolocalizzazione:
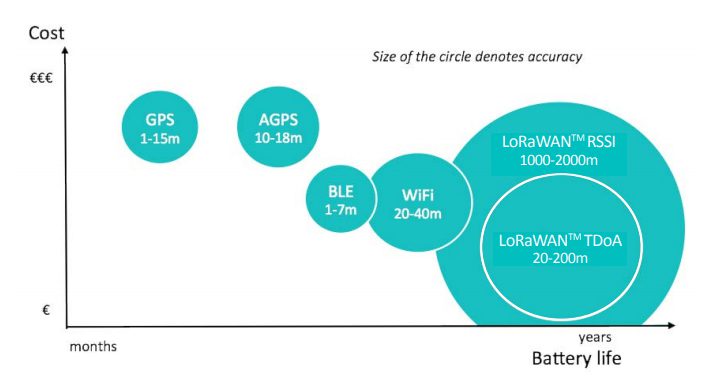
- un primo metodo basato sul Received Signal Strength Indication (RSSI), ovvero sulla misurazione della potenza del segnale ricevuto, che fornisce un rilevamento della posizione indicativa con un’accuratezza compresa tra 1000-2000m;
- un secondo metodo basato sul Time Difference Of Arrival (TDOA), ovvero sulla misurazione della differenza del tempo di arrivo del segnale, che fornisce un rilevamento della posizione precisa con un’accuratezza di 20-200m.
Nel seguente grafico un confronto tra le vare tecnologie di localizzazione:
In ogni caso un nodo di una rete LoRaWAN può essere localizzato se le sue trasmissioni in uplink sono ricevute da tre o più gateway, in generale la precisione della geolocalizzazione migliora al crescere del numero di gateway.
Quando diversi gateway ricevono contemporaneamente lo stesso messaggio di uplink, possono rilevare la posizione del nodo tramite semplici tecniche di triangolazione.
Un altro requisito fondamentale per poter effettuare la geolocalizzazione tramite TDOA è la precisissima sincronizzazione temporale dei gateway, solitamente ottenuta tramite GPS, ma anche con un altro mezzo che consenta di sincronizzare il clock dei gateway con differenze di poche decine di nanosecondi.
Nella maggior parte dei casi questi requisiti non sono disponibili per cui, per avere una precisa geolocalizzazione è necessario dotare il dispositivo di un sistema GPS che, come sappiamo, incide non poco sia sui costi che sul consumo, riducendo di molto l’autonomia del device anche se questo funziona in classe A.
La tecnologia LoRa Edge
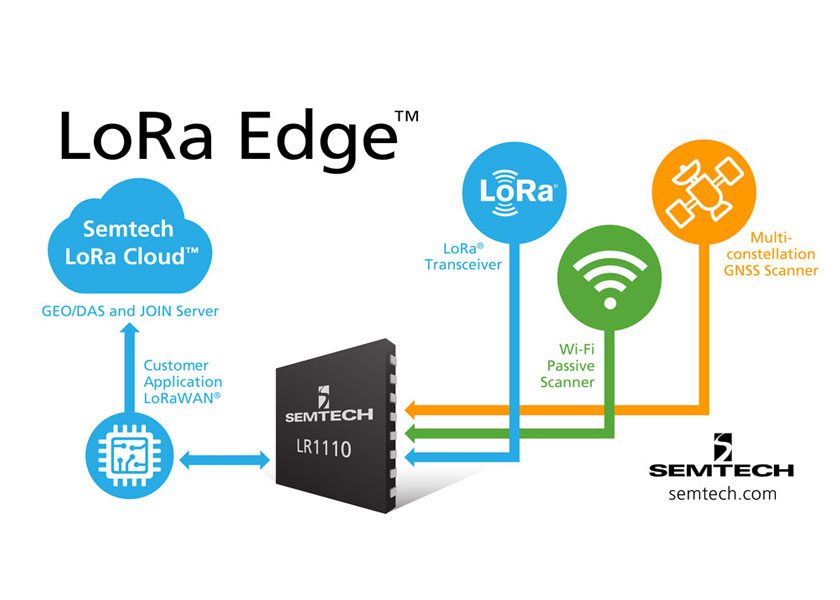
Per offrire la possibilità di una geolocalizzazione precisa mantenendo bassi i consumi, Semtech ha recentemente introdotto la tecnologia LoRa Edge, una soluzione composta dal nuovo chip LR1110 (completamente compatibile con gli IC SX1261/2/8) e dalla piattaforma cloud LoRa Edge.
Il dispositivo LR1110 aggiunge al supporto di bande di frequenza in tutto il mondo nell’intervallo 150 – 960 MHz, le funzionalità di geolocalizzazione Wi-Fi e GNSS. È dotato di scansione GNSS (GPS / BeiDou) a bassa potenza e scansione passiva a bassissima potenza Wi-Fi 802.11b / g / n. Supporta le modulazioni LoRa e (G) FSK ed è pienamente compatibile con le generazioni precedenti di radio LoRa. Può trasmettere fino a +22dBm in alta potenza o fino a + 15dBm in bassa potenza con funzionamento nelle bande ISM 150 MHz – 960 MHz. Il dispositivo viene fornito in un package QFN32 da 5 × 5 mm.
Semtech LR1110 è in grado di utilizzare la tecnologia LPWAN per trasmettere a un server di geolocalizzazione le informazioni di localizzazione acquisite. La posizione dell’oggetto viene calcolata dal server di geolocalizzazione, che analizza le informazioni trasmesse e correla la posizione con i dati di un database di geolocalizzazione, garantendo un equilibrio unico tra basso consumo e prestazioni.
Questa tecnologia abiliterà un ampio ventaglio di applicazioni per il monitoraggio di beni sia all’interno di edifici che all’esterno, rivolta ai mercati industriale, edile, residenziale, agricolo, trasporti e logistica.
La piattaforma di geolocalizzazione LoRa Edge consentirà ai fornitori di soluzioni di sfruttare le capacità di localizzazione uniche di LoRa nonché le funzionalità di scansione GNSS e WiFi con una soluzione single chip, consentendo ai clienti di scegliere il miglior strumento di localizzazione per l’attività dell’applicazione che stanno affrontando.
Eliminando la necessità di componenti GNSS e WiFi incrementali, LoRa Edge riduce i costi della distinta materiali (BOM) dei dispositivi e riduce significativamente la complessità di progettazione e approvvigionamento. Con l’aggiunta dei servizi di geolocalizzazione LoRa Cloud, che forniscono un conveniente e semplice calcolo della posizione nel Cloud basandosi sui dati, TDOA, GNSS e WiFi, è possibile mantenere praticamente immutato il consumo di energia e migliorare l’efficienza dell’asset management. LoRa Edge consente ai clienti di gestire ulteriormente il total cost of ownership (TCO), pagando solo quando è necessario usufruire del servizio per individuare un target. L’implementazione delle chiavi di sicurezza in fase di produzione e il successivo processo di sicurezza sicuro semplificano ulteriormente lo sviluppo di soluzioni IoT, rispondendo alle aspettative di sicurezza dei clienti.
Altri chip LoRa Edge saranno rilasciati nella prima metà del 2020.
Caratteristiche salienti
Front End radio multiuso:
- Gamma di sintetizzazione continua con frequenze tra 150 e 2700 MHz
- Analisi segnali GPS/BeiDou
- Analisi segnale WiFi
(G)FSK RF Transceiver LoRa a basso consumo:
- Supporto le frequenze della gamma 150 – 960 MHz
- Potenza di uscita RF massima +22 dBm
- Potenza di uscita RF standard +15 dBm
- Completamente compatibile con lo standard LoRaWAN
Motore crittografico:
- Supporto hardware per algoritmi basati sulla crittografia/decrittografia AES 128
- Gestione dei parametri del dispositivo come DevEUI e JoinEUI
- Protegge le informazioni riservate come le chiavi di crittografia
- Memorizza NwkKey, AppKey, come definito nello standard LoRaWAN
Dunque, oltre alle funzionalità di ricetrasmettitore globale sub-GHz, il dispositivo LR1110 presenta un front-end multibanda a bassissima potenza in grado di acquisire diversi segnali radio al fine di rilevare la propria posizione:
- Indirizzi MAC degli Acces Point Wi-Fi con protocolli 802.11b/g/n
- Segnali satellitari GNSS (attualmente delle costellazioni americane GPS e cinese BeiDou, oltre che degli SBAS geostazionari EGNOS e WAAS).
Le informazioni acquisite non vengono elaborate in loco ma inviate, utilizzando la rete LPWAN, ad un server di geolocalizzazione che analizza il file con le informazioni trasmesse e correla la posizione con un database, abilitando un perfetto equilibrio di sistema tra bassi consumi e prestazioni.
LR1110, schema a blocchi
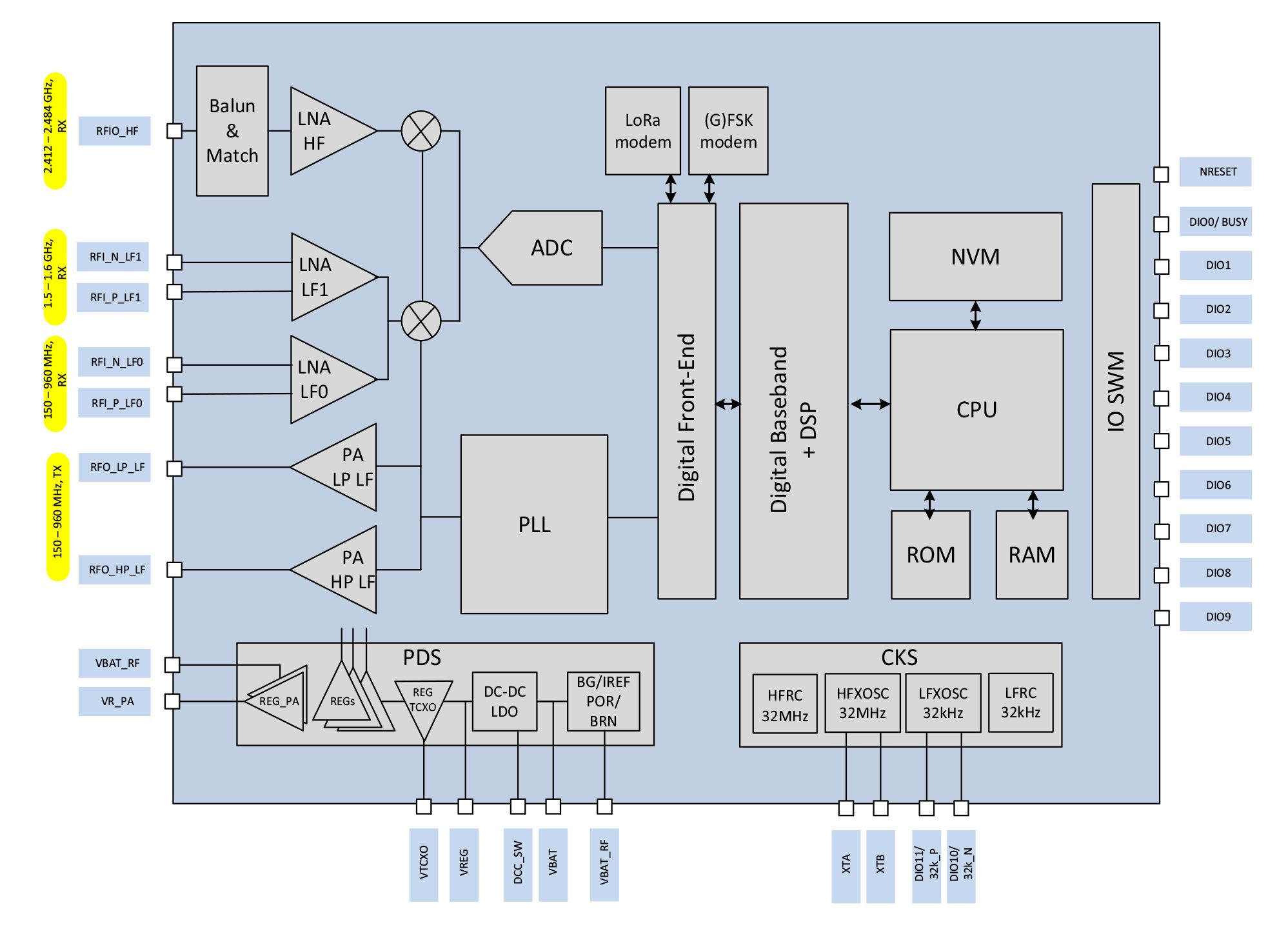
Sezione Ricetrasmettitore RF Half-Duplex ad alta sensibilità LoRa / (G) FSK e bassa potenza.
- Supporto globale di bande di frequenza nell’intervallo 150 – 960 MHz
- Modalità figura a basso rumore per una migliore sensibilità FSK LoRa / (G) (pin di ingresso differenziale RFI_P / N_LF0)
- Percorso PA ad alta potenza +22 dBm (pin di uscita RFO_HP_LF)
- Percorso PA ad alta efficienza +15 dBm (pin di uscita RFO_LP_LF)
- Selettore dell’alimentazione del regolatore PA integrato per semplificare la doppia alimentazione + 15 / + 22 dBm con un’implementazione su una scheda
- In grado di supportare la distinta base multi-regione in tutto il mondo, il circuito si adatta alle nuove configurazioni per soddisfare i limiti normativi
- Pienamente compatibile con la famiglia SX1261 / 2/8 e lo standard LoRaWAN, definito da LoRa Alliance.
Front-end radio multiuso
- Gamma di sintetizzatori a frequenza continua da 150 a 2700 MHz
- Scansione GPS / BeiDou (pin di ingresso differenziale RFI_P / N_LF1)
- Scansione passiva Wi-Fi (utilizzando il pin di input / output RFIO_HF)
- ADC RX ad elevata larghezza di banda (fino a 24 MHz DSB)
- Baseband digitale
Questi i consumi delle sezioni RF LoRa / Wi-Fi / GNSS
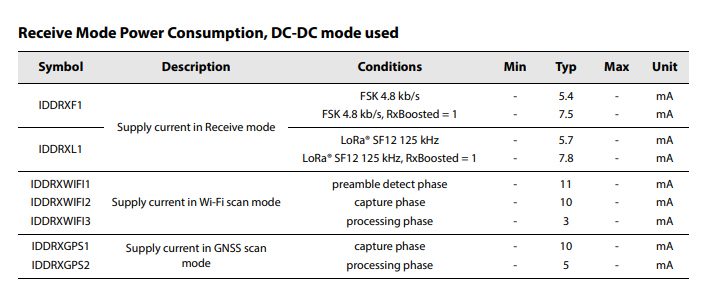
Come si vede il consumo di corrente varia da 5,4 a 7,8 mA per il ricevitore LoRa, tra 3 e 11 mA durante l’attivazione della scansione Wi-Fi e da 5 a 10 mA durante la scansione GNSS.
Entriamo ora nel vivo della tecnica utilizzata dal dispositivo LR1110 per una localizzazione all’interno di edifici (effettuata con segnali Wi-Fi) e all’esterno, sfruttando le reti satellitari GNSS.
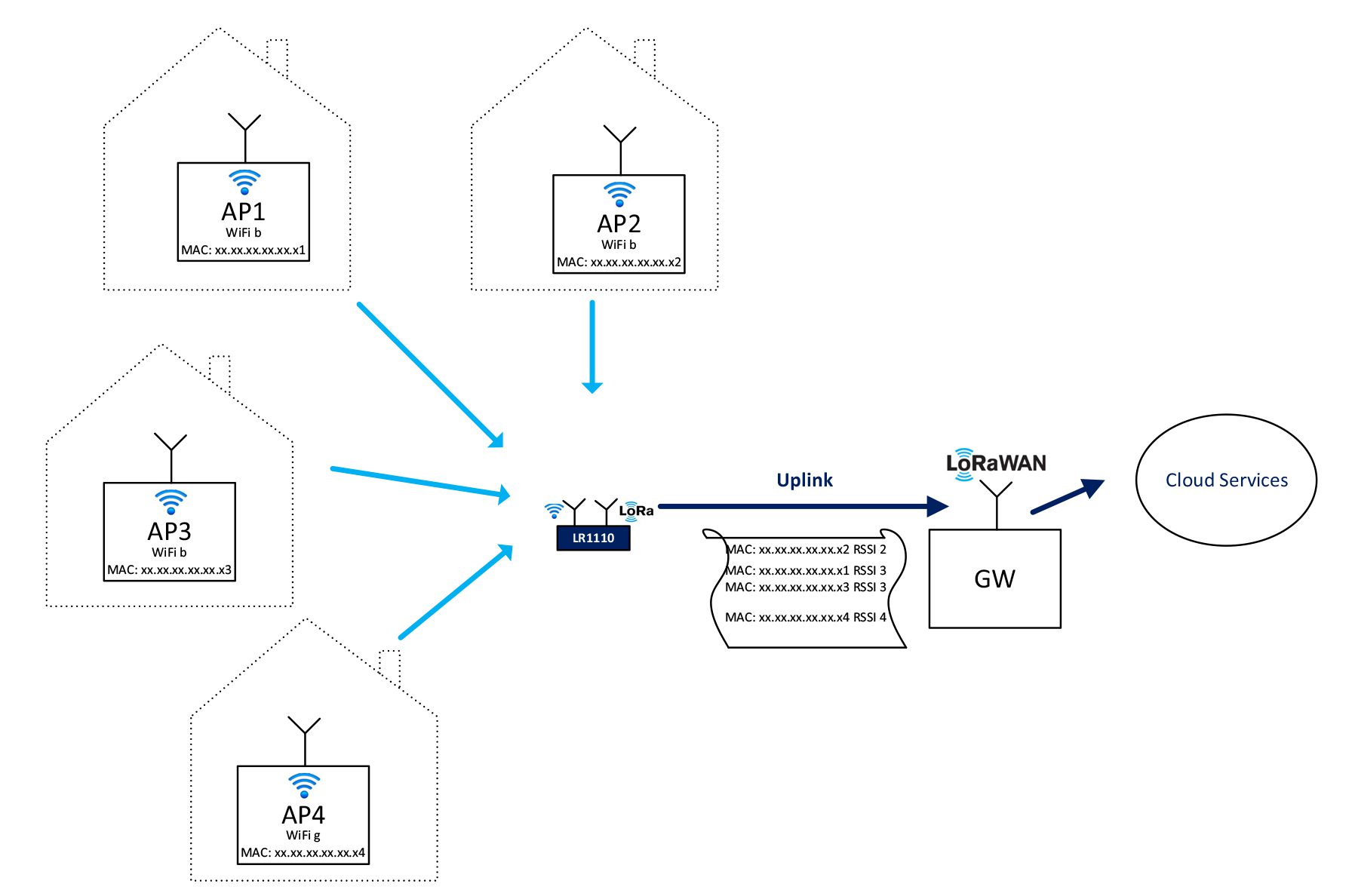
Scansione passiva Wi-Fi
Il dispositivo LR1110 è in grado di identificare i segnali degli Acces Point Wi-Fi 802.11b/g/n disponibili nelle vicinanze ed estrarre l’indirizzo MAC che consente di geolocalizzare il dispositivo. L’obiettivo è ottenere almeno 2 indirizzi MAC, che possono essere utilizzati per localizzare il dispositivo, dopo che sono stati inviati a un servizio di ricerca online.
Principio di scansione passiva Wi-Fi
Per essere più efficienti dal punto di vista energetico, solo una piccola parte dei pacchetti Wi-Fi contenenti le informazioni dell’indirizzo MAC viene acquisita e demodulata.
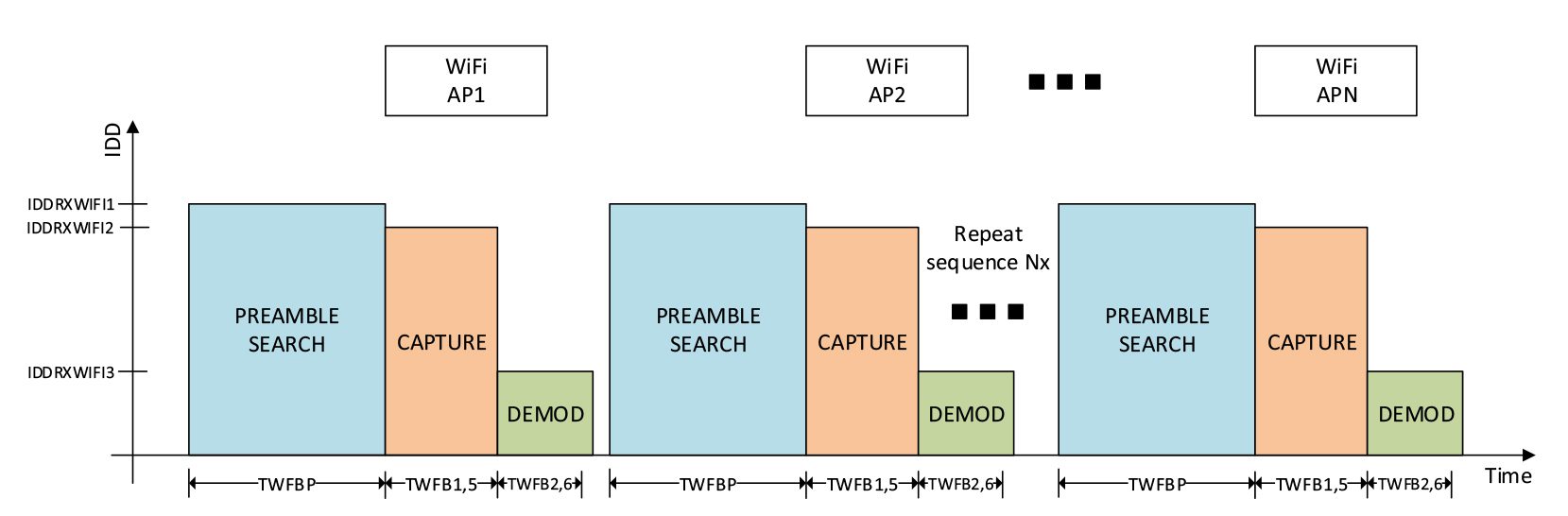
La scansione passiva Wi-Fi è composta da una sequenza di tre fasi: ricerca preambolo, acquisizione e demodulazione, con l’identificazione dell’indirizzo MAC, se presente. Per ottenere ulteriori indirizzi MAC è necessario ripetere la sequenza. Per ridurre al minimo il consumo di corrente, il front-end RF viene spento durante la fase di demodulazione. L’indirizzo MAC è l’unica informazione obbligatoria richiesta per trovare la posizione del dispositivo. Il sistema estrae anche il livello del segnale RF associato (RSSI) che può essere inviato facoltativamente al servizio cloud per migliorare la precisione. La scansione passiva Wi-Fi implementata nel chip LR1110 può anche estrarre le informazioni sul solo codice paese di un punto di accesso, contenute nel beacon o nel probe response.
Una singola scansione passiva Wi-Fi comprende tre fasi:
- La fase di ricerca del preambolo, il dispositivo rimarrà in modalità RX fino a quando non viene rilevato l’inizio di un preambolo
- La fase di acquisizione, il dispositivo acquisisce la parte del pacchetto contenente le informazioni richieste
- La fase di demodulazione, durante la quale le informazioni richieste vengono demodulate.
Sequenza di scansione passiva Wi-Fi
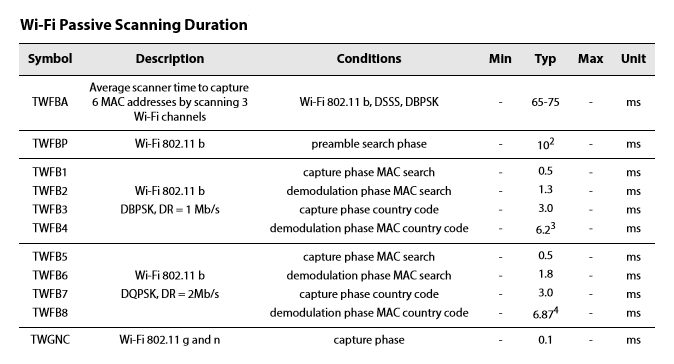
La durata della ricerca del preambolo dipende dal traffico nel canale. Per i canali occupati, verrà rapidamente rilevato un preambolo. Per i canali in cui è presente solo un segnale AP e viene generato poco traffico, la ricerca del preambolo può essere lunga quanto l’intervallo beacon impostato per quell’AP specifico (impostato nominalmente su 102,4 ms).
Nel dettaglio la durata delle varie fasi della ricerca degli indirizzi MAC è riportata dalla seguente tabella:
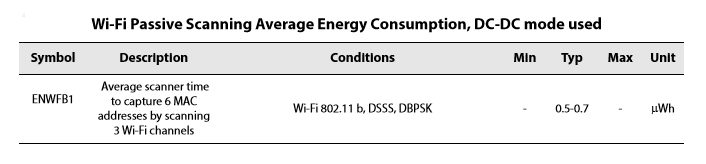
Mentre l’assorbimento complessivo di energia per effettuare la cattura di 6 MAC è il seguente:
Scansione GNSS
Il dispositivo LR1110 è dotato di uno scanner GNSS veloce e a bassa potenza. Il dispositivo acquisisce una breve porzione del segnale trasmesso dai satelliti GNSS ed estrae le informazioni necessarie per calcolare la posizione del dispositivo: le cosiddette pseudorange. Queste informazioni sono aggregate in un messaggio NAV che può essere inviato a un sistema di back-end per calcolare la posizione del dispositivo.
Principio di scansione GNSS in modalità assistita
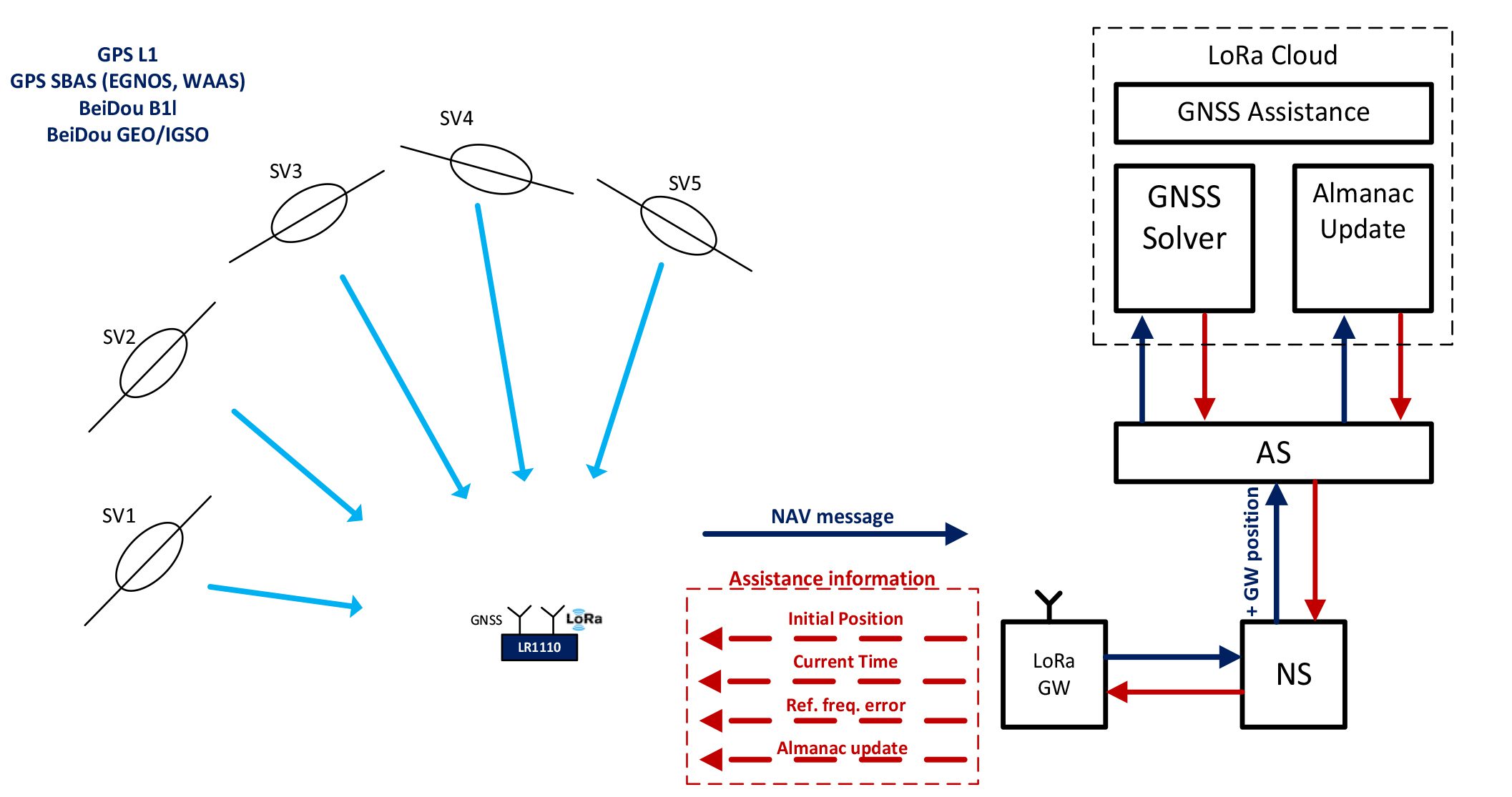
L’hardware dello scanner GNSS del chip LR1110 può supportare le seguenti costellazioni:
- GPS L1 + GPS SBAS geostazionario: EGNOS e WAAS
- BeiDou B1 + BeiDou SBAS geostazionario: GEO / IGSO
La ricerca dei satelliti è una sfida di ricerca tridimensionale: l’ID satellite, l’offset di frequenza dovuto allo spostamento Doppler e la fase del codice sono sconosciuti. Per questo motivo fornire informazioni di assistenza al dispositivo LR1110 ridurrà al minimo lo spazio di ricerca, riducendo il tempo di acquisizione e l’energia spesa. Per accelerare il rilevamento dei satelliti, è possibile fornire all’LR1110 i seguenti parametri di assistenza:
- Una stima approssimativa della posizione iniziale del dispositivo
- L’ora corrente
- L’errore di riferimento della frequenza da compensare
- Una versione recente dell’Almanacco, necessaria per stimare la posizione dei satelliti visibili, al momento e nel luogo della scansione.
Tutti questi parametri contribuiscono all’errore totale della stima Doppler per ciascun satellite:
- L’errore di 200 km nella posizione iniziale equivale all’aumento di 200 Hz dello spazio di ricerca della frequenza
- ± 30 secondi di errore nella stima del tempo equivalgono a un aumento di 20 Hz dello spazio di ricerca della frequenza
- L’errore di riferimento della frequenza di 0,1 ppm equivale a un aumento di 150 Hz dello spazio di ricerca della frequenza
- Ogni mese dell’Almanacco contribuisce all’aumento di 62 Hz dello spazio di ricerca della frequenza
Una volta acquisito un breve periodo del segnale di trasmissione satellitare, il rilevamento dei satelliti dall’LR1110 viene effettuato in due fasi principali:
- una ricerca più rapida dei satelliti disponibili ricevuti dal dispositivo con un segnale forte
- una ricerca più approfondita dei satelliti disponibili ricevuti dal dispositivo con un segnale debole
Oltre a fornire le pseudo-gamme di quei satelliti ricevuti con un segnale forte, la prima fase stima anche l’offset di frequenza del dispositivo e definisce lo spazio di ricerca della frequenza per la seconda fase.
La seconda fase implica una ricerca centrata sull’offset di frequenza risultante dall’errore Doppler e dall’errore di riferimento di frequenza sul dispositivo. Con le migliori informazioni di assistenza, la ricerca può essere limitata a una finestra di soli 125 Hz.
Con un’informazione di assistenza meno precisa, ad esempio se i dati delle effemeridi non sono aggiornati, la finestra di ricerca viene estesa a intervalli di ± 125 Hz, aumentando il tempo di ricerca e il consumo di energia.
Il dispositivo LR1110 può tenere conto delle informazioni sull’Almanacco per accelerare la fase di elaborazione del segnale GNSS. I parametri Almanacco contengono parametri orbitali grossolani che descrivono il movimento dei veicoli spaziali. Insieme a una stima approssimativa di tempo e posizione, l’Almanacco può essere utilizzato per escludere veicoli spaziali irrilevanti e ridurre la finestra di ricerca per la ricerca degli errori Doppler.
Tutte le informazioni di assistenza trasferite all’LR1110 sono personalizzate per un caso d’uso LPWAN.
Lo scanner GNSS dell’LR1110 è in grado di operare in due modalità: autonoma e assistita.
Scansione GNSS autonoma
In questa modalità, il chip LR1110 non richiede alcuna informazione di assistenza, viene eseguita una ricerca rapida di tutti i satelliti con segnale forte nella costellazione selezionata e vengono rilevati tutti i satelliti ricevuti con un segnale migliore di RXSGPS1E.
Questa modalità può essere utilizzata per determinare se il dispositivo si trova all’interno o all’esterno; nel caso in cui non venga rilevato alcun segnale satellitare forte, l’applicazione conclude che il dispositivo è al coperto. Pertanto la ricerca di segnali deboli, che richiede più tempo e consumo di energia, può essere scartata; potrebbe invece essere avviata la ricerca di altri segnali di opportunità, come il Wi-Fi.
Scansione GNSS assistita
Sulla base delle informazioni di assistenza, l’LR1110 costruirà un elenco di 10-12 satelliti che dovrebbe fornire la posizione del dispositivo e l’ora effettiva. Sono implementate due diverse modalità assistite:
- Scansione GNSS assistita “bassa potenza”: verrà effettuata una prima ricerca di satelliti per segnali forti nell’elenco di quelli visibili. Se viene trovato almeno un satellite in questo passaggio, la ricerca continuerà per i satelliti con segnali più deboli. Altrimenti la ricerca si fermerà. Questa modalità riduce al minimo il consumo di energia e può essere utilizzata anche come metodo di rilevamento interno / esterno, in modo più efficiente rispetto alla modalità di scansione GNSS autonoma. La classificazione indoor viene decisa dopo aver cercato 10-12 satelliti, rispetto a 32-35 unità in modalità di scansione autonoma.
- Scansione GNSS assistita “best effort”: verrà effettuata una prima ricerca di satelliti con segnali forti, all’interno dell’elenco dei satelliti visibili. Anche se nella prima fase non viene trovato alcun satellite, la ricerca continuerà per i satelliti con segnali più deboli. Questa modalità deve essere utilizzata in ambienti difficili in cui è possibile trovare satelliti, a spese di una fase di ricerca più lunga. Lo scanner utilizza una sequenza di fasi di acquisizione ed elaborazione. Per risparmiare energia, il front-end RF verrà spento durante le fasi di elaborazione.
Panoramica del sistema di geolocalizzazione GNSS
Il chip LR1110 è dotato di un ricevitore GNSS che consente una geolocalizzazione esterna veloce ed efficiente dal punto di vista energetico. Il sistema GNSS dell’LR1110 ottiene la geolocalizzazione a bassa energia scaricando operazioni ad alta intensità di tempo e di calcolo verso i componenti del sistema di back-end. In particolare, per far funzionare il sistema di geolocalizzazione GNSS dell’LR1110 sono necessari i seguenti tre componenti del sistema back-end:
- Componente di risoluzione della posizione GNSS: l’LR110 non risolve l’intera posizione sul dispositivo. Invece, le misure dai segnali GNSS vengono combinate in un messaggio binario (il messaggio NAV) e si prevede che vengano inviate tramite qualsiasi canale di comunicazione al componente backend del Risolutore di posizione GNSS per il calcolo della posizione finale. Questo componente è richiesto in tutte le modalità operative.
- Componente di aggiornamento almanacco GNSS (richiesto in modalità assistita): LR1110 è in grado di ridurre il tempo di scansione GNSS prendendo in considerazione parametri orbitali grossolani per diverse costellazioni GNSS (i parametri Almanac). Insieme a una stima approssimativa di tempo e posizione, LR1110 utilizza queste informazioni per ottimizzare la ricerca e l’acquisizione di segnali GNSS. Nel tempo, le posizioni dei veri satelliti divergono dai parametri fissi dell’Almanacco, il che richiede che siano aggiornati. Ciò può essere ottenuto da un componente back-end che stima la qualità dell’immagine dell’almanacco sul dispositivo e pubblica aggiornamenti quando necessario. Questo componente è necessario se si utilizza la modalità GNSS assistita.
- Componente di assistenza GNSS (richiesto in modalità assistita): per far funzionare il sistema di geolocalizzazione GNSS in modalità assistita, è necessario fornire all’LR1110 stime approssimative di tempo e posizione. Queste informazioni possono essere ottenute in vari modi, inclusa la conoscenza a livello di applicazione. In LoRaWAN il protocollo di sincronizzazione dell’orologio a livello di applicazione è adatto per recuperare informazioni sui tempi di assistenza. Le informazioni sulla posizione di assistenza possono generalmente essere derivate da soluzioni di posizione passate. LoRaCloud offre questi componenti in un unico servizio facile da usare e gestito come parte del Device and Application Services (DAS).
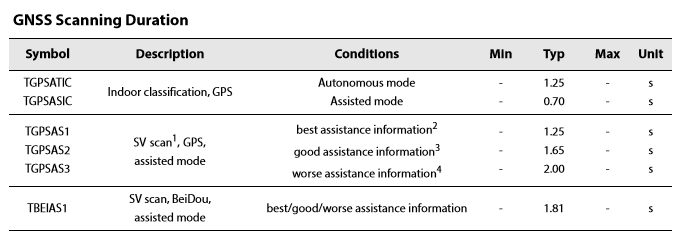
Nella seguente tabella sono riportati i tempi medi di acquisizione GNSS nelle varie modalità di acquisizione.
Controllo switch RF
Il dispositivo LR1110 è in grado di controllare fino a 5 switch RF o LNA esterni sui percorsi RF Wi-Fi, GNSS e Sub-GHz, riducendo il numero di IO del controller host richiesti per l’applicazione. Ciò consente di selezionare MCU applicativi con un numero di pin ridotto o un footprint ridotto e quindi progettare soluzioni altamente integrate. La polarità dei segnali di controllo dell’interruttore RF può essere impostata in ciascuna modalità radio.
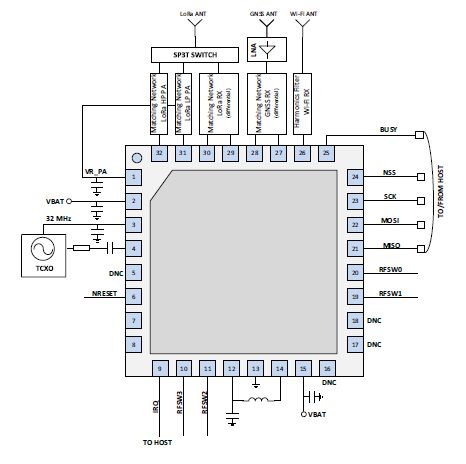
Questa, infine, è la configurazione finale del dispositivo LR1110:
LR1110 User Manual
Questo manuale descrive i comandi firmware e le varie modalità di funzionamento dell’LR1110. Vengono descritti i comandi con i quali attivare le varie sezioni RF del dispositivo (RX,TX, Scansione GNSS, Scansione Wi-Fi), gli interrupt, le linee di ingresso e di uscita, ecc.
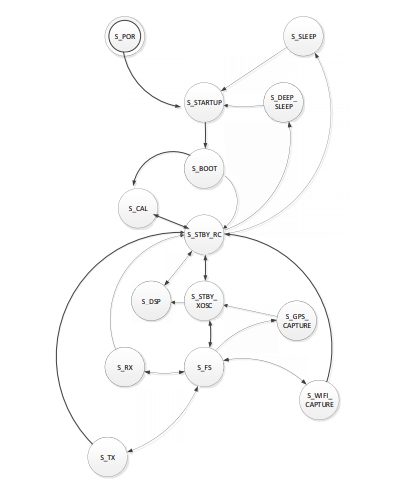
La modalità Standby è quella predefinita dell’LR1110: rappresenta lo stato di ritorno da tutte le altre modalità (aspettarsi specifiche opzioni di fallback) e la modalità da cui sono possibili le transizioni verso le altre modalità. Tutti i comandi per configurare il dispositivo devono essere emessi in questa modalità. Sono disponibili due orologi per il sistema: l’oscillatore RC interno a 32 MHz (modalità Standby RC) o un cristallo esterno / TCXO da 32 MHz (modalità Standby Xosc). L’orologio RC viene utilizzato per impostazione predefinita per tutte le transizioni della modalità automatica. L’orologio crystal / TCXO consente transizioni più veloci verso altre modalità a scapito di un consumo energetico maggiore.
Modalità di scansione GNSS
La modalità di scansione GNSS consente di rilevare i segnali GPS e BeiDou sui pin RFI_N_LF1 e RFI_P_LF1, i dati satellitari vengono quindi estratti ed elaborati dal DSP integrato. Alla fine dell’elaborazione, il segnale BUSY ritorna al livello basso, indicando che i dati di scansione GNSS sono disponibili per il controller host. Il risultato dell’elaborazione può quindi essere trasmesso a un server di geolocalizzazione utilizzando una rete LPWAN per calcolare la posizione del dispositivo. Come abbiamo visto in precedenza sono disponibili diverse modalità secondarie di scansione GNSS, a seconda della disponibilità dei dati e dell’assistenza di un almanacco.
Modalità di scansione passiva Wi-Fi
La modalità di scansione passiva Wi-Fi consente il rilevamento di segnali Wi-Fi (802.11b, g, o n) dai punti di accesso nelle vicinanze del dispositivo sul pin RFIO_HF. Il segnale Wi-Fi viene elaborato dal DSP integrato e gli indirizzi MAC disponibili vengono estratti. Al termine dell’elaborazione del segnale Wi-Fi, il segnale BUSY ritorna basso, indicando che gli indirizzi MAC sono disponibili per il controller host e pronti per essere inviati ad un server di geolocalizzazione utilizzando una rete LPWAN per calcolare la posizione del dispositivo.
Modalità DSP
Le funzioni di geolocalizzazione dell’LR1110 richiedono l’elaborazione delle acquisizioni dell’ambiente Wi-Fi o GNSS. In questa modalità, solo il DSP e i regolatori associati sono mantenuti attivi al fine di ridurre al minimo il consumo di energia.
Bibliografia:
LoRa Edge: The Simplified IoT Asset Management Platform by Pedro Pachuca; Why Every IoT Device Needs Geolocation by Marc Pégulu; AN1200.56 LR1110 evaluation kit; LR1110 Data Sheet;LR1110 User Manual;LR1110 evaluation kit design files; LoRa Edge Brochure.