Non ci sono prodotti a carrello.

Non è lontano il giorno in cui i robot eseguiranno molte delle mansioni oggi svolte dagli esseri umani. Già oggi esistono aspirapolvere robotizzati che puliscono le nostre case e falciatrici robotizzate che tagliano l’erba nei nostri giardini. Nelle fabbriche, i robot costruiscono molti dei prodotti che utilizziamo, dagli spazzolini da denti alle automobili. I robot servono i pasti in Cina e in Giappone, mentre i droni spargono fertilizzanti nelle fattorie e consegnano le merci.
Pertanto non passerà molto tempo prima che i robot costruiscano le nostre case, le nostre strade e ci portino in giro in auto. Ma uno dei requisiti fondamentali affinché questo futuro diventi realtà è che i robot dispongano di sensi simili a quelli umani.
Una delle sfide più importanti per i dispositivi robotizzati è il modo in cui trovano il percorso da seguire senza andare a sbattere contro pareti, mobili, attrezzature, persone o altri robot. Per evitare gli intralci e svolgere il loro lavoro in modo efficace, i robot devono essere in grado di rilevare gli ostacoli a distanza di pochi metri o pochi centimetri, in modo da poter cambiare percorso.
Le tecnologie più comuni per il rilevamento di ostacoli includono:
- Rilevamento ad ultrasuoni, che trasmette onde ultrasoniche e ascolta gli echi che vengono riflessi in ritorno da eventuali ostacoli.
- Sensori per il tempo di volo ottico (ToF, time-of-flight), che utilizzano un fotodiodo per acquisire le onde luminose riflesse dagli ostacoli.
- Sensori radar, che utilizzano onde a radiofrequenza e gli echi di ritorno dagli oggetti per determinare la direzione e la distanza di un oggetto in movimento.
Questo post si concentrerà sul rilevamento a ultrasuoni, un’alternativa a basso costo e velocità inferiore rispetto al radar per quei robot che non necessitano di raggiungere velocità elevate in ambito domestico e industriale. Il rilevamento a ultrasuoni è più affidabile rispetto al tempo di volo ottico per evitare gli intralci, in quanto il rilevamento a ultrasuoni non è influenzato dalla quantità di luce disponibile riflessa dagli ostacoli. Un altro vantaggio del rilevamento a ultrasuoni è la capacità di rilevare il vetro o qualsiasi altra superficie trasparente, in quanto utilizza onde sonore a differenza della luce per rilevare gli oggetti.
Scoprite i nostri progetti di riferimento per realizzare aspirapolvere robotizzati all’avanguardia: Per saperne di più sui robot di servizio
Molte applicazioni per la robotica
Si consideri un aspirapolvere robotizzato che, su comando o seguendo un programma preimpostato, lascia la propria base e gira per la casa per pulirne i pavimenti. Un metodo valido per progettare questo sistema sarebbe l’utilizzo di sensori a ultrasuoni integrati sui lati dell’aspirapolvere per fornire una copertura totale a 360°. La spaziatura e il numero di sensori dipenderebbero dalla forma dell’aspirapolvere e dal campo visivo (FOV, field of view) del sensore a ultrasuoni.
Mentre l’aspirapolvere robotizzato si sposta negli ambienti, la rete di sensori a ultrasuoni provvede alla mappatura degli ostacoli, calcola la distanza da essi e fornisce tali informazioni all’unità di elaborazione centrale (CPU) per aggirarli. Un approccio simile con sensori a ultrasuoni integrati funzionerebbe per falciatrici robotizzate, giocattoli interattivi robotizzati, robot per ristoranti o servizi di vendita al dettaglio e molto altro ancora, come mostrato in Figura 1.

Figura 1: Esempi di robot di servizio
Come secondo esempio, è possibile considerare i robot per catena di montaggio e i robot che spostano le materie prime o le merci finite all’interno di una fabbrica e fra una fabbrica e il magazzino.
Nelle fabbriche moderne, i bracci robotizzati assemblano i prodotti spostandosi in giro per prelevare e posizionare i componenti e montare dadi e bulloni, come mostrato in Figura 2. Una problematica generale per i proprietari di fabbriche e per i costruttori di sistemi robotizzati consiste nell’installazione di sensori su bracci robotizzati per prevenire le collisioni fra un robot nello stesso ambiente produttivo. I sensori a ultrasuoni installati in punti adeguati di bracci robotizzati o veicoli mobili robotizzati possono fornire informazioni sugli oggetti nei dintorni, oltre ad informazioni sulla distanza che le CPU di questi sistemi robotizzati devono mantenere per evitare le collisioni.
Figura 2: Componenti del sistema robotizzato per catena di montaggio
I componenti di un sistema basato sugli ultrasuoni per evitare gli ostacoli per l’impiego sui robot dovrebbe includere:
- Trasduttori ad ultrasuoni. Si tratta di cristalli piezoelettrici che oscillano per generare onde sonore ultrasoniche quando viene applicata una tensione in CA e, viceversa, quando ritorna l’eco. Esistono due tipologie di trasduttori: a parte superiore chiusa, in cui il cristallo piezoelettrico è sigillato ermeticamente (per proteggerlo dall’ambiente) ed a parte superiore aperta, in cui il cristallo è esposto o coperto da una struttura simile a una retina per altoparlanti. I trasduttori a parte superiore chiusa richiedono una tensione di azionamento maggiore, che necessita di un componente aggiuntivo nel sistema: un trasformatore.
- Un trasformatore. Un trasformatore single-ended o a presa centrale genera l’elevata tensione richiesta per azionare i trasduttori a parte superiore chiusa.
- Un processore di segnale a ultrasuoni e un driver del trasduttore. Ad esempio, il PGA460 di TI aziona il trasformatore, elabora i segnali elettrici di ritorno dagli echi e calcola i dati del tempo di volo per ciascuna eco interessata in tempo reale.
- Una CPU. Questa parte di un sistema robotizzato utilizza le informazioni del tempo di volo provenienti da più sensori a ultrasuoni intorno al robot per eseguire la mappatura degli ostacoli e fermare il robot o guidarlo per allontanarlo da essi, a seconda della sua programmazione.
Un esempio di modulo transceiver ad ultrasuoni che combina un trasduttore a ultrasuoni e il PGA460 di TI, un processore di segnale a ultrasuoni e il circuito integrato del driver è mostrato in basso nella Figura 3. I file di progetto per il modulo sono disponibili come riferimento TI per i clienti.
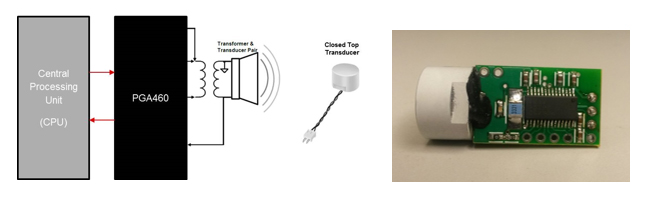
Figura 3: Esempio di modulo transceiver a ultrasuoni
Primi passi nel rilevamento a ultrasuoni
Il rilevamento a ultrasuoni è una soluzione pratica, conveniente e affidabile per i sistemi robotizzati domestici e industriali. TI offre diversi dispositivi per rispondere alle esigenze di varie applicazioni.
Una vasta gamma di prodotti collaterali tra cui moduli di valutazione di tecnologie, guida alla scelta dei trasduttori, regolazione di precisione del processore per trasduttori specifici, layout della scheda ottimizzato per EMI, file di progetto per moduli a piccolo fattore di forma ecc. è disponibile per sviluppare rapidamente questa tecnologia per il vostro prodotto specifico.
Risorse supplementari
- Per iniziare, visitate la pagina del portale di rilevamento ad ultrasuoni.
- Scaricate il white paper «Come aumentare funzionalità ed efficienza negli aspirapolvere robotizzati».
- Leggete un altro posto sul blog dello stesso autore «Come la tecnologia a ultrasuoni migliora la praticità e le prestazioni nell’automazione domestica».
- Visitate la pagina dei Documenti tecnici PGA460 con i file di progetto per piccoli fattori di forma.
- Scoprite come possiamo aiutarvi nello sviluppo degli intelligenti e sofisticati sistemi robotizzati del futuro.