Non ci sono prodotti a carrello.

Alimentare dispositivi Ethernet industriali richiede la conoscenza di specifici aspetti della tecnologia Ethernet relativi all’indirizzamento e alle applicazioni industriali.
La più grande differenza tra Ethernet standard e Ethernet industriale è la topologia, come mostrato nella Figura 1. Ethernet standard è una topologia a stella, mentre Ethernet industriale include differenti topologie.
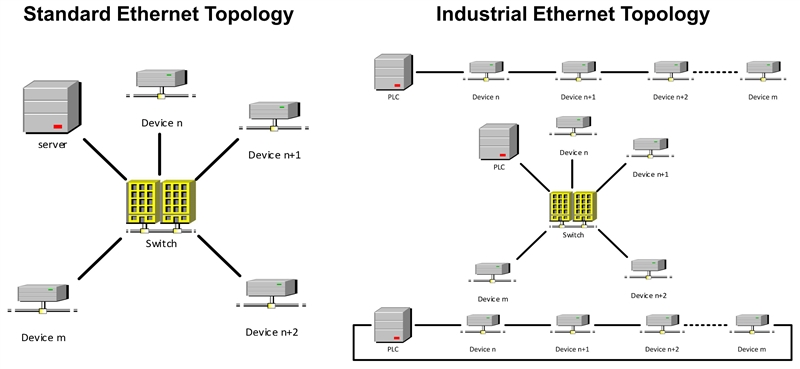
Figura 1: i due tipi di topologie Ethernet
Oltre alla differente topologia, i dispositivi di automazione industriale funzionano a 24 V, mentre i dispositivi di telecomunicazione sono alimentati a 48 V.
Queste due differenti versioni esistono da tempo, mentre la prima specifica soluzione di alimentazione per Industrial Ethernet è stata appena rilasciata: EtherCAT P. In questo articolo spiegherò cos’è EtherCAT P prima di illustrare alternative per le topologie 1000BASE-T e/o topologie ad anello o con singolo doppino incrociato.
EtherCAT P: un unico cavo per alimentazione e EtherCAT
Ovunque c’è una crescente necessità di connettersi, ma anche di trasferire energia, ottimizzando la distribuzione tramite Ethernet.
Un’opzione naturale sarebbe quella di riutilizzare la tecnologia PoE (Power over Ethernet) per alimentare dispositivi connessi via Ethernet. Il vantaggio della tecnologia PoE è che utilizza gli stessi fili per l’alimentazione e il trasferimento dei dati, risparmiando sia sull’installazione che sui costi totali di cablaggio, come mostrato nell’esempio del sistema di automazione di fabbrica in Figura 2.
Per questo, la sorgente di potenza PoE si accoppia alle linee dati collegando la tensione a 48 V alla presa centrale dei due trasformatori Ethernet di ingresso; il dispositivo slave preleva la tensione di alimentazione dai terminali centrali della coppia dei trasformatori dati.

Figura 2: EtherCAT P consente di ridurre il numero di cavi e portare il rilevamento
high-end su teste mobili di robot.
Tuttavia, nel caso di una connessione Ethernet industriale con una topologia di linea, i 25 MHz della comunicazione Ethernet saranno presenti all’uscita dell’alimentatore e potrebbero quindi essere accoppiati sul lato di trasmissione. In tal caso, il trasmettitore soffrirebbe del rumore proveniente dal segnale di comunicazione del canale ricevente.
Per questo motivo, EtherCAT P (che è un’estensione di EtherCAT) introduce un semplice filtro induttore-condensatore (LC) per garantire che i 25 MHz del 100BASE-T vengano bloccati prima di entrare nell’alimentatore.
Un’altra differenza tra PoE ed EtherCAT P è che PoE offre solo una tensione di alimentazione di 48 V, mentre EtherCAT P fornisce due rail indipendenti da 24 V che sono isolati l’uno dall’altro, come mostrato nella Tabella 1. In termini di potenza, PoE può fornire 71 W (per 803.2 bt Tipo 4), mentre EtherCAT P offre 24 V x 3 A ≥ 72 W per rail di tensione.
Un’altra differenza tra le due tecnologie è che per PoE è necessario un chip per l’identificazione tra la sorgente di alimentazione (power sourcing equipment, PSE) e il dispositivo alimentato (PD). Il chip all’interno del PD è anche responsabile per l’impostazione del limite di potenza massima. Questo porta due vantaggi: la piena potenza è disponibile solo se viene stabilita una connessione valida e i dispositivi con funzionalità PoE possono connettersi a dispositivi non PoE senza danneggiarli.
Nel caso di EtherCAT P, sono necessarie solo componenti passivi standard per accoppiare l’alimentazione senza alcun chip aggiuntivo. Ciò significa che l’alimentazione a 24 V è sempre presente sulla linea dati. Tuttavia, la potenza massima deve essere limitata all’interno del PSE.

Tabella 1: parametri chiave di entrambe le tecnologie Ethernet
L’EtherCAT P One Cable for Power e l’EtherCAT Reference Design mostrano un’implementazione del circuito di un EtherCAT P PSE. Il progetto di riferimento soddisfa tutti i requisiti della “Guida all’implementazione per slave P EtherCAT ed EtherCAT“. Questi requisiti includono caratteristiche come protezione da inversione di polarità, limite di corrente di picco e limite di corrente continua, tutti basati su semiconduttori di Texas Instruments.
Per la comunicazione EtherCAT, il progetto di riferimento può connettersi a una piattaforma di comunicazione con capacità EtherCAT come il motore di comunicazione industriale AMIC110 (ICE) con un cavo Ethernet. Per mostrare la funzionalità di trasferimento di potenza, è possibile collegare due schede di progettazione con un cavo EtherCAT P. È inoltre possibile collegare un master EtherCAT al primo progetto di riferimento e uno slave EtherCAT al secondo progetto di riferimento per un sistema di dimostrazione EtherCAT P completo. Per ulteriore facilità di valutazione, è possibile montare sulla scheda anche un modulo buck opzionale 5V / 12V.
Per quanto riguarda PoE, ecco qui un video sul nuovo standard PoE IEEE 802.3bt.