Non ci sono prodotti a carrello.
Un’analisi della metodologia basata sull’angolo di arrivo e sulle modalità di utilizzo di questa tecnologia
Denis Zebrowski
Field Applications Systems Engineer (onsemi)
La versione 5.1 della Bluetooth® Core Specification rappresenta una tappa importante dell’evoluzione della tecnologia Bluetooth, in particolare per quel che concerne le funzionalità di “direction finding” (rilevamento della direzione). Grazie ad essa è possibile migliorare la precisione dei servizi di localizzazione, che assumono un’importanza cruciale in applicazioni quali navigazione in ambienti chiusi e tracciamento degli asset.
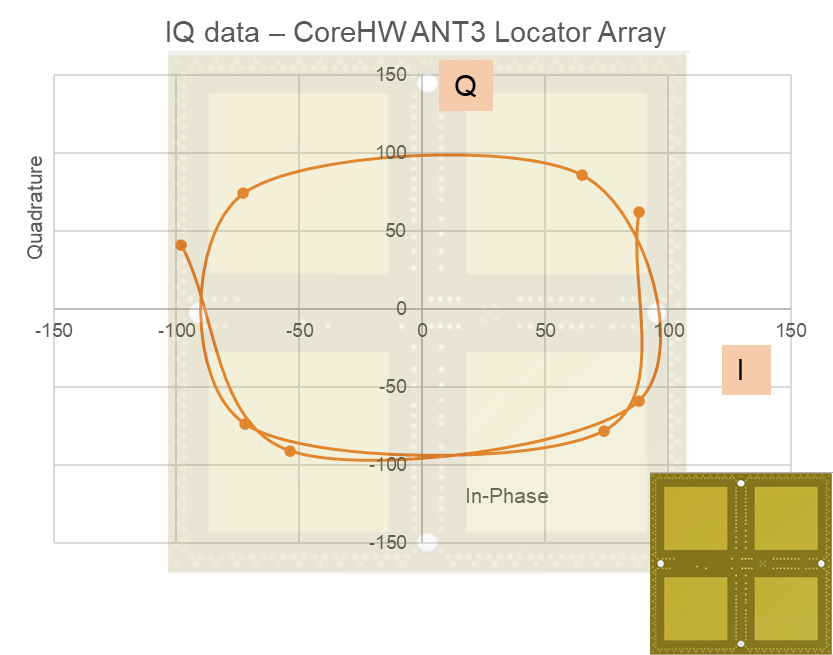
Fig. 1: L’utilizzo del metodo dell’amgolo di arrivo supportato da Bluetooh in ambito sanitario è in continuo aumento
Il rilevamento della direzione tramite Bluetooth è una tecnologia all’avanguardia che permette di migliorare i servizi di localizzazione di numerosi dispositivi. Per espletare tale operazione è possibile utilizzare il metodo dell’angolo di arrivo (AoA – Angle of Arrival) oppure quello dell’angolo di partenza (AoD – Angle of Departure).
Nelle applicazioni di vendita al dettaglio, i modelli di dati che forniscono informazioni dettagliate relativamente al flusso di materiale, all’utilizzo e ai modelli comportamentali sono stati sviluppati a fondo per generare KPI (Key Performance Indicator) relativi all’attività all’interno del punto vendita, come a esempio la durata del servizio, i percorsi più utilizzati, gli hotspot e altri parametri correlati al comportamento dei consumatori (Fig. 2).
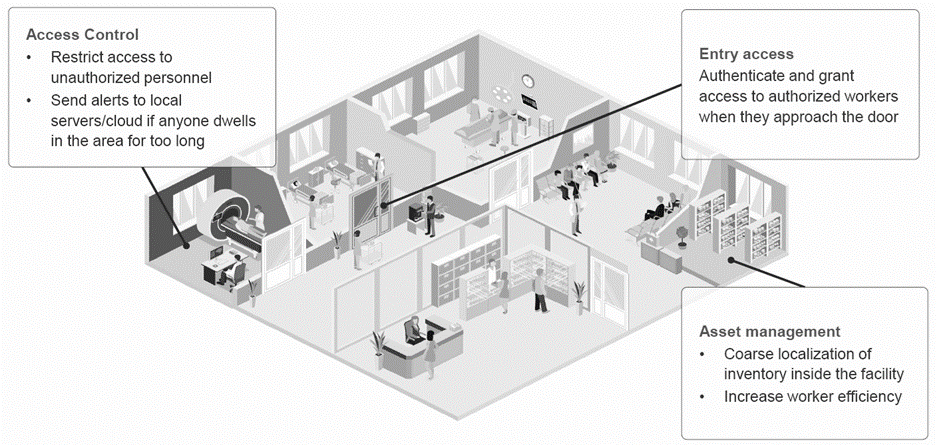
Fig. 2: Esempio di dati “più utilizzati” relativi alle vendite al dettaglio visualizzati sulla pianta del negozio
La versatilità dei metodi di rilevamento della direzione supportati da Bluetooth, che prevede modalità di funzionamento senza connessione (connection-less) e orientate alla connessione, ne permette l’utilizzo in una gamma di applicazioni ancora più ampia, aprendo nuovo possibilità nel campo delle comunicazioni wireless e dei servizi di localizzazione negli anni a venire.
Funzionamento del metodo AoA e principi base di progettazione
Benché entrambi i metodi, AoA e AoD, utilizzino gli stessi principi fondamentali di misura dei segnali a radiofrequenza, si differenziano per l’approccio adottato per l’elaborazione del segnale e per le configurazioni delle antenne. Utilizzando un array di antenne, i dispositivi possono determinare la direzione di un segnale con un livello di precisione che in precedenza non era possibile conseguire (Fig. 3).
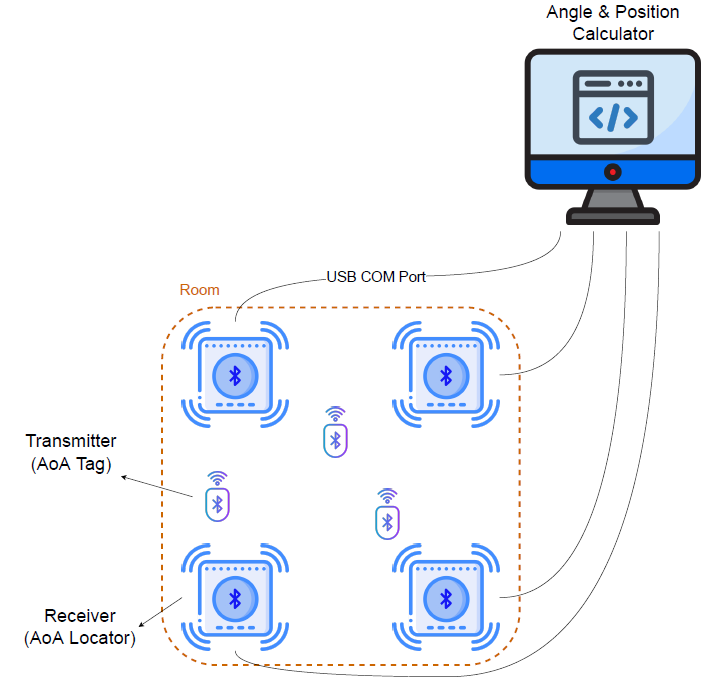
Fig. 3 – Schema di un sistema per il rilevamento della posizione (struttura AoA)
Il sistema per il rilevameno della direzione risulta composto dai seguenti elementi:
- Transmittitore (Tag AoA)
- Ricevitore (Localizzatore AoA)
- Unità per il calcolo dell’angolo e della posizione
La tecnica per il rilevamento della direzione adottata dalla tecnologia Bluetooth prevede il coinvolgimento di un trasmettitore che invia un segnale CTE (Constant Tone Extension). Il ricevitore, equipaggiato con numerose antenne, utilizza quindi questo segnale per determinare la direzione della sorgente (Fig. 4).

Fig. 4 – I bit del segnale CTE aggiunti al pacchetto Bluetootth LE
I principi alla base dei meccanismi AoA possono essere riassunti nei seguenti passaggi (Fig. 5):
- I tag avviano la comunicazione trasmettendo in modalità “extended advertising” sui canali primari, e successivamente in modalità “periodic advertising” (ovvero a intervalli fissi e pianificati) sui canali secondari.
- I localizzatori sono progettati per rilevare questa modalità di “exended advertising”, sincronizzarsi con i tag e quindi acquisire gli advertisement periodici che includono un segnale CTE.
- Il segnale CTE viene campionato dai localizzatori, generando un insieme di dati noto come campioni I/Q.
- Questi campioni I/Q vengono elaborati da un algoritmo per il calcolo degli angoli che determina l’angolo tra il tag e il localizzatore.
- Noti gli angoli tra un tag e più localizzatori, il sistema è in grado di triangolare la posizione del tag, consentendo una localizzazione accurata in modalità AoA senza connessione.
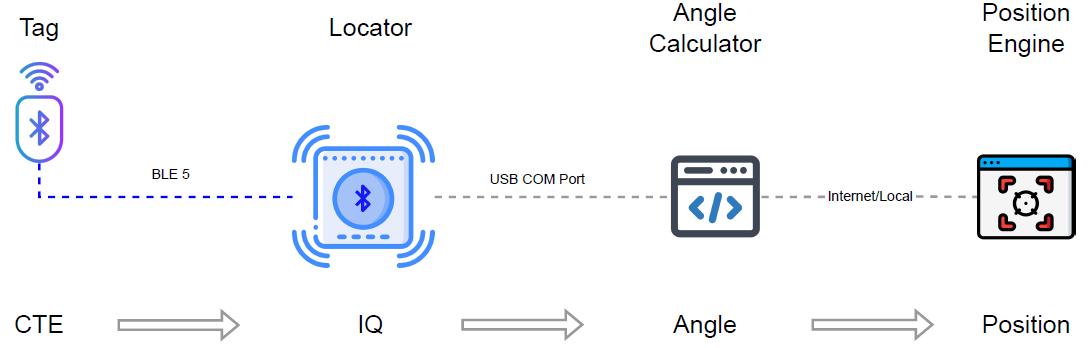
Fig. 5 – Flusso dei dati di un sistema per il rilevamento della direzione che utilizza l’angolo di arrivo (AoA)
Quando un trasmettitore emette un segnale, questo viaggia verso l’esterno (del trasmettitore) alla velocità della luce in tre dimensioni e il suo percorso traccia una sfera in espansione.
Per semplificare il concetto dell’angolo di arrivo o di partenza, si prenderà in considerazione solamente il caso bidimensionale, relativo quindi al piano cartesiano. Si tratta di una semplificazione largamente adottata soprattutto nelle applicazioni di tracciamento degli asset, perché la terza coordinata, corrispondente all’elevazione dell’oggetto, viene considerata irrilevante (Fig. 6).

Fig. 6 – Principi su cui si basa il metodo dell’angolo di arrivo
Misurando lo sfasamento tra due antenne riceventi (Ψ 2 – Ψ 1), note la distanza tra di loro (d) e la lunghezza d’onda del segnale (λ), è possibile calcolare l’angolo del segnale sfruttando alcune nozioni base di trigonometria.
Nei moderni ricevitori radio, la demodulazione I/Q rappresenta un passaggio critico. Essa prevede l’estrazione dei componenti I e Q dal segnale CTE originale (raw) ricevuto. In pratica, l’ingresso RF viene dapprima moltiplicato per un fasore complesso (componenti I e Q) e successivamente filtrato e sotto-campionato per produrre il flusso di dati IQ (Fig.7).
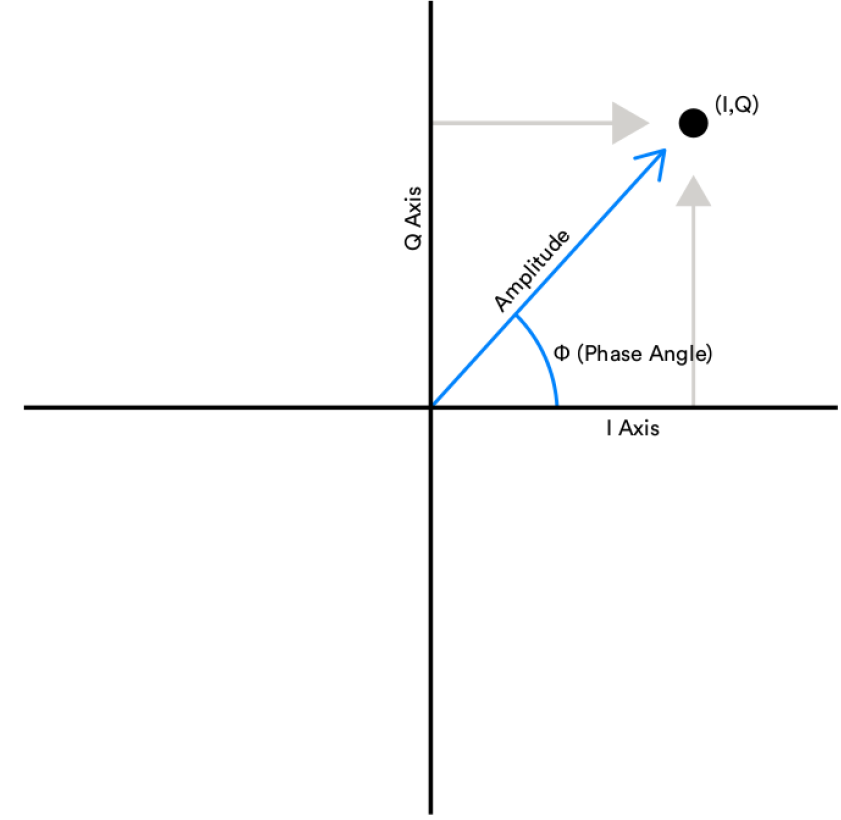
Fig 7 – A sinistra viene riportato il grafico che mostra le coordinate I e Q. Sulla destra viene riportato la posizione del tag visualizzata sul piano IQ misurata mediante un array di 4 antenne
Le varie fasi del processo si possono così riassumere (Fig. 8)
- Down-mixing (miscelazione verso il basso): I dati I/Q vengono moltiplicati per un fasore complesso (una coppia seno e coseno) a una frequenza uguale (o prossima) a quella della portante. Grazie a questa operazione, il segnale viene spostato verso una frequenza intermedia (IF -Intermediate Frequency) più bassa.
- Filtraggio passa-basso: Dopo la fase di down mixing, un filtro passa basso elimina i componenti indesiderati ad alta frequenza, lasciando solamente il segnale in banda base.
- Decimazione: Il segnale filtrate viene quindi sotto campionato per ridurre la velocità di trasferimento dati, preservando nel contempo le informazioni essenziali.
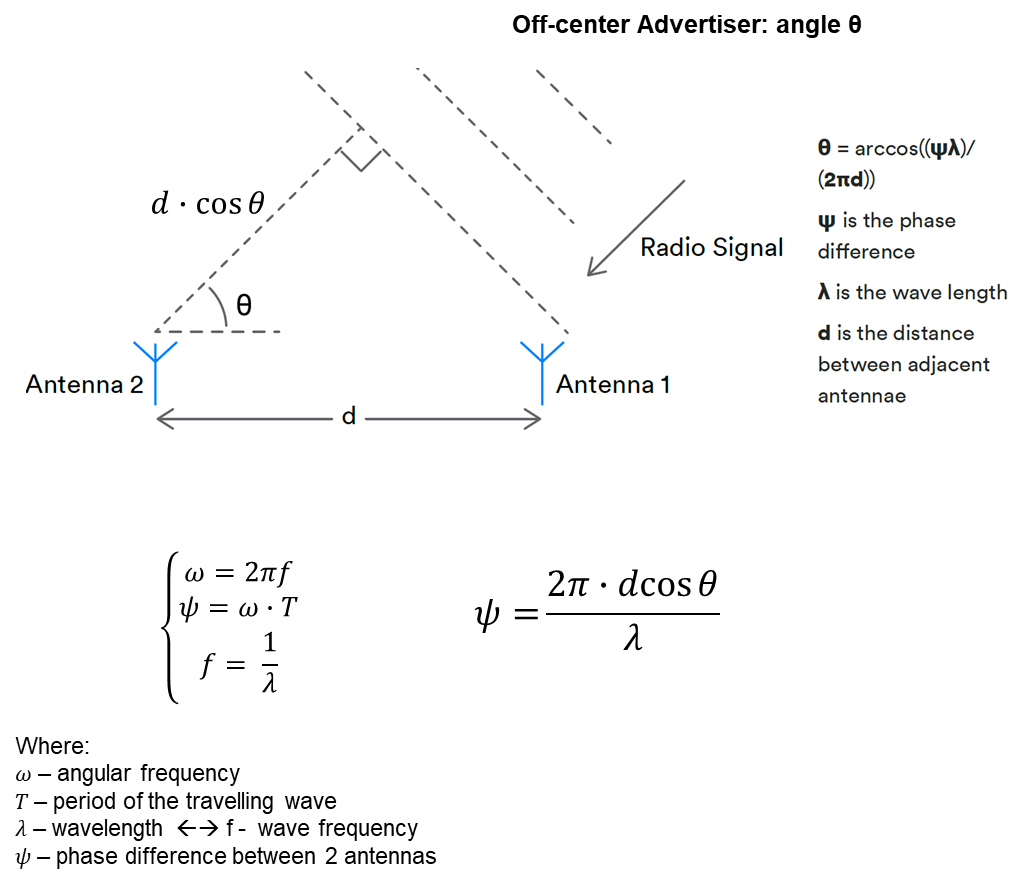
Fig. 8 – La demodulazione dei dati IQ all’interno del front end radio di un dispositivo Bluetooth
< Per maggiori informazioni è possibile consultare la nota applicativa: TND6431 – Designing Power-Efficient Wireless Location Finding Systems (onsemi.com) >
Alcune considerazioni di progetto e analisi delle limitazioni
In sistemi di posizionamento più precisi, in grado cioè di fornire in uscita la terza coordinata cartesiana, è necessario calcolare almeno due angoli per mostrare la relazione che intercorre tra il trasmettitore e il ricevitore in tre dimensioni (triangolazione). Per ottenere il secondo angolo, è necessario un secondo localizzatore AoA. Questi due angoli sono denominati Azimut ed Elevazione.
Il metodo alternativo, che non richiede la misura di alcun angolo, è denominato trilaterazione. Viene spesso implementato utilizzando la misura della distanza basata sul tempo di volo (ToF – Time of Flight), per la quale si ricorre al metodo Channel Sounding (Bluetooth 5.4) o alle sue diverse varianti a banda ultralarga (UWB – Ultra Wide Band).
Il Channel Sounding (CS), rilasciato con la versione 5.4 della specifica Bluetooth Core, che viene indicato anche con l’acronimo HADM (High Accuracy Distance Measurement) nella nomenclatura Bluetooth, potrebbe essere considerato un’alternativa ad alta precisione per la misura della distanza basata su RSSI. Grazie al Channel Sound, le applicazioni che già utilizzano Bluetooth Low Energy possono beneficiare di una maggiore precisione senza incorrere in costi aggiuntivi in termini di hardware. Nella tabella 1 vengono riassunte le tecnologie per la misura delle distanze che utilizzano Bluetooth LE.
| RSSI | Angolo di arrivo (AoA) | Channel Sounding | |
| Metodo di localizzazione | Determina la stima della distanza sulla base dell’intensità del segnale del trasmettitore | Determina l’angolo relativo tra due punti | Determina la distanza tra due punti utilizzando il tempo di volo (ToF) e misura della distanza basate sulla fase |
| Requisiti d’antenna | Antenna singola | Più antenne richieste dalle specifiche | Non sono richieste più antenne, anche se sono utili per una risoluzione ottimale della posizione |
| Connettività Bluetooth LE | Con e senza conessione | Con e senza connessione | Con connessione |
| Indicatori di prestazioni | +/- 5 m, elevate sensibilità alle interferenze prodotte da percorsi multipli | Accuratezza +/- 3° – azimuth
Accuratezza +/- 5° – elevazione |
+/- 0.3 m < 5m con PBR (Phase based Ranging)
+/- 0.5 m > 5m con PBR (Phase based Ranging) |
| Vantaggi della soluzione | Supporto universale
Per misure RSSI nei prodotti Bluetooth LE esistenti
|
● Soluzione scalabile per il tracciamento della posizione in real-time ● Durata della batteria compreso tra 5 e 10 anni
|
● Fattore di forma ridotto con progetto flessibile dell’antenna ● Aggiunta di funzioni di sicurezza mediante prossimità
|
Tab. 1 – Confronto tra le diverse tecnologie per la misura della distanza mediate Bluetooth LE
RSL15: la soluzione AoA di onsemi
Il microcontrollore RSL15 (che supporta Bluetooth 5.2) sviluppato da onsemi permette di eseguire un tracciamento affidabile degli asset utilizzando il metodo dell’angolo di arrivo. Il progetto prevede due parti separate:
- Scanner: applicazione ble_scanner_DF_multiple che gira sulla scheda del localizzatore.
- Advertiser: applicazione ble_advertiser_DF che gira sulle schede dei tag.
Il nucleo di comunicazione wireless dello scanner e dell’advertiser è il System on Chip RSL15 5.2 di onsemi. In alternativa, la soluzione più integrata basata sul medesimo prodotto di onsemi è il System-in-Package 2EG di Murata (Fig. 9).
Lo scanner si occupa della ricezione dei segnali CTE inviati dal tag di advertising dai quali si ottengono i campioni IQ.
Questi campioni vengono inviati a un’altra applicazione in esecuzione su un PC o su un servizio cloud, per calcolare l’angolo tra lo scanner e l’advertiser. Infine, gli angoli calcolati vengono convertiti in coordinate cartesiane e mappati in due o tre dimensioni.
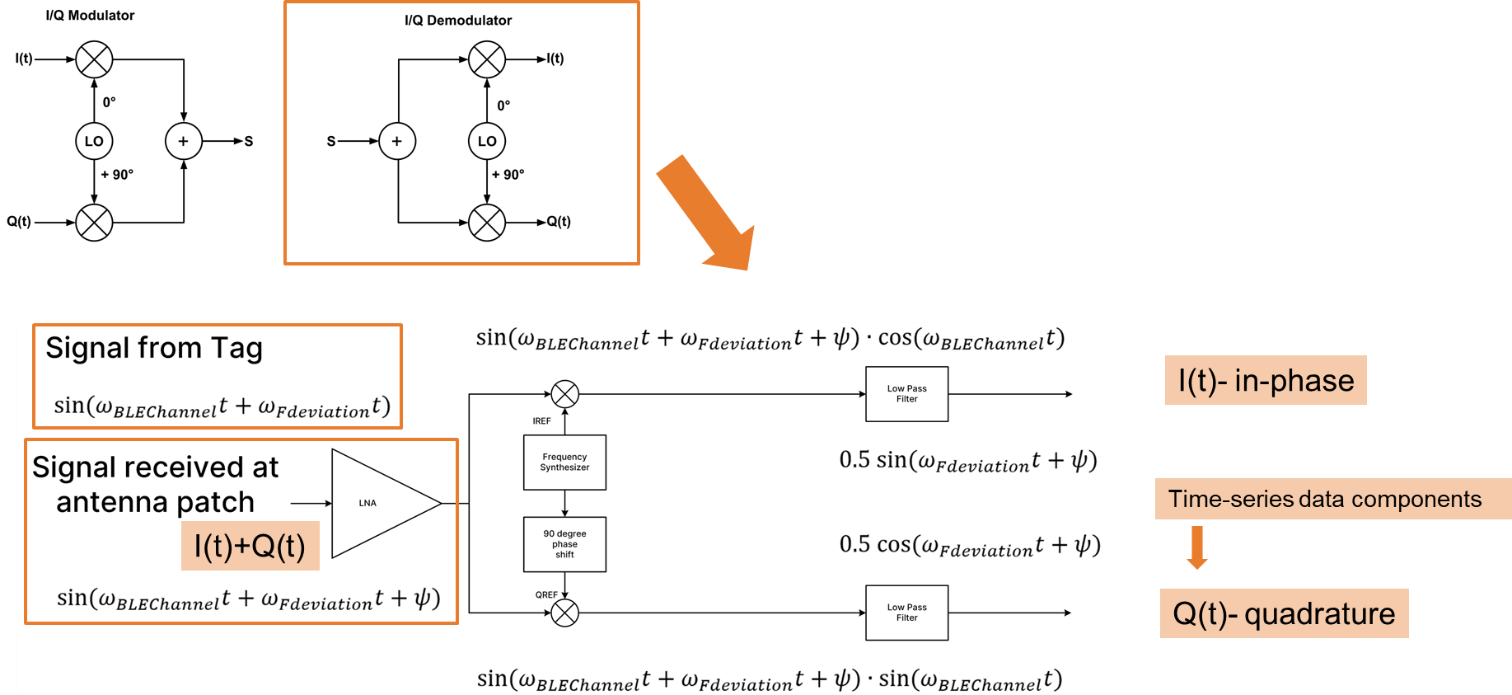
Fig. 9 – La soluzione completa end-to-end, dal tag Bluetooth LE ai dati di posizione in tempo reale
Il codice di esempio sopramenzionato per entrambe le applicazioni è disponibile gratuitamente nel CMSIS pack di onsemi che può essere scaricato dal sito web della società (Fig. 10).

Fig. 10 – Esempi di codice campione forniti da onsemi per le modalità con e senza connessione
Chiunque può scaricare e utilizzare il tool per la stima dei consumi di onsemi per verificare quali schemi e parametri di comunicazione utilizzare e ottimizzare la durata della batteria. Ciò fornisce informazioni teoriche estremamente utili relative a limiti e prestazioni previste del sistema (Fig.11).
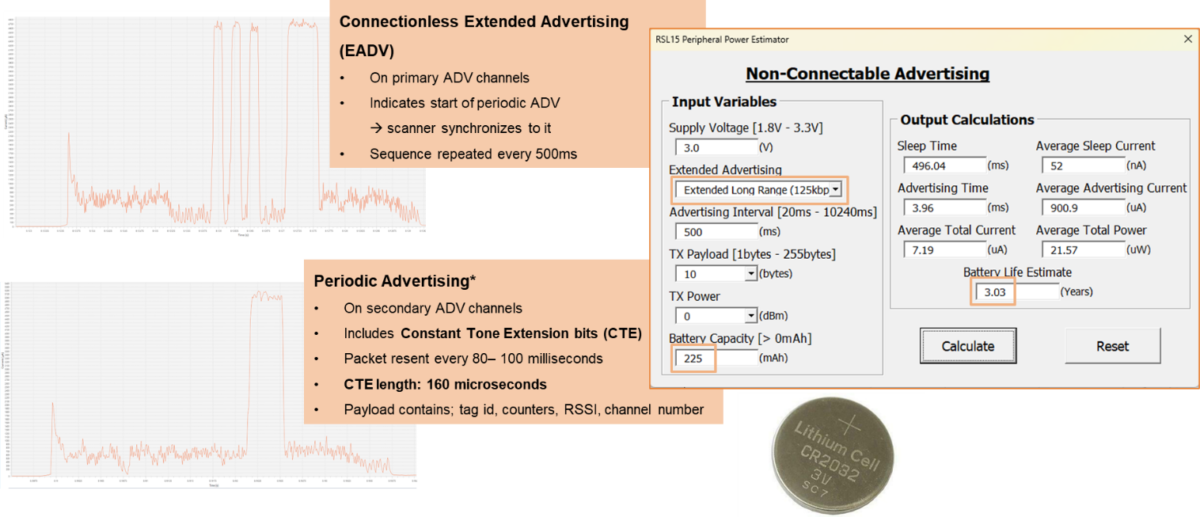
Fig. 11 – Tool per la stima della durata della batteria di onsemi e parametri relativi al rilevamento della direzione
CoreHW è un’azienda che progetta e commercializza schede di array di antenne in diversi fattori di forma che garantiscono una precisione eccellente per quanto riguarda la stima della posizione, dell’ordine del cm. Queste schede d’antenna, già predisposte per la produzione, operano nella gamma di frequenze compresa tra 2400 e 2483 MHz e prevedono fino a 16 porte d’antenna di tipo single-ended (Fig. 12).
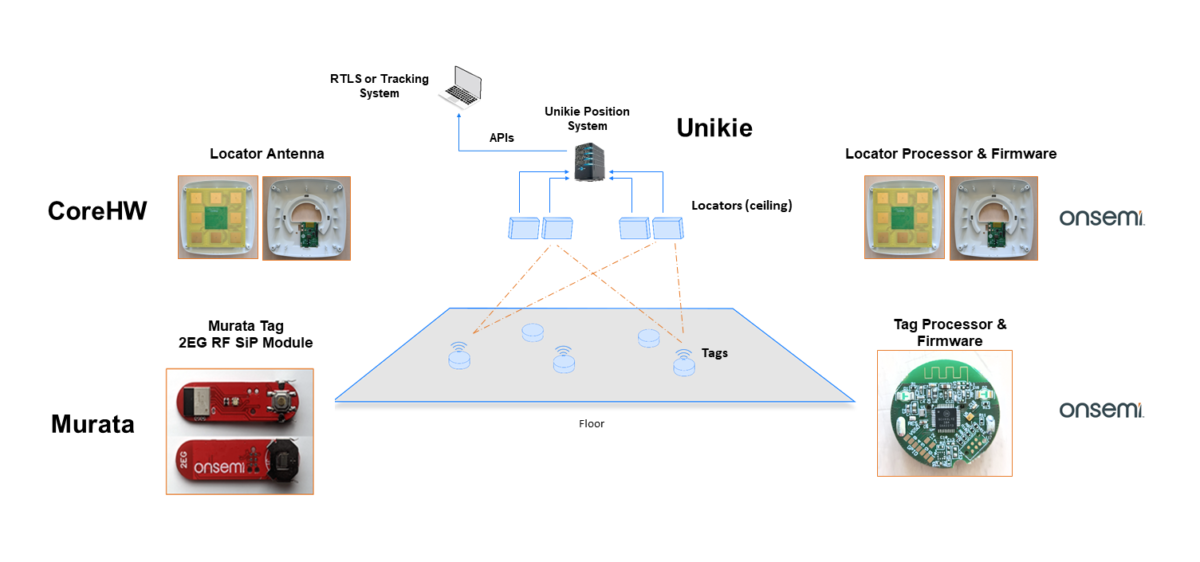
Fig. 12 – La scheda di valutazione (EVB) di RSL15 ospitata all’interno del localizzatore di coreHW
Le antenne includono il commutatore d’antenna AoA e AoD Bluetooth CHW1010 SP16T per la selezione dell’antenna unitamente ai connettori per i segnali di controllo digitali ed RF che semplificano l’interfacciamento con le schede di controllo dei SoC BLE (Fig. 13).
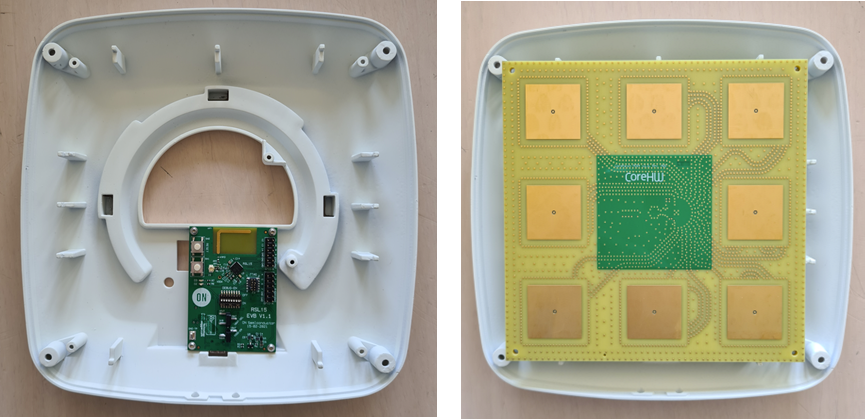
Fig. 13 – Array d’antenne di core HW
L’engine di localizzazione Bluetooth Low Energy di Unikie è stato progettato per il tracciamento in tempo reale di tag Bluetooth Low Energy. I dati generati
possono essere elaborati sia su server edge sia nel cloud, garantendo così la massima flessibilità e costi contenuti. (Fig. 14). Inoltre,
le API dell’engine permettono un’integrazione molto semplice con i sistemi aziendali, supportando una sofisticata modellazione dei dati. In questo modo è possibile avere una conoscenza approfondita dei flussi di materiale, dei tassi di utilizzo e dei modelli comportamentali, che permette di migliorare notevolmente i servizi basati sulla localizzazione e la gestione degli asset.
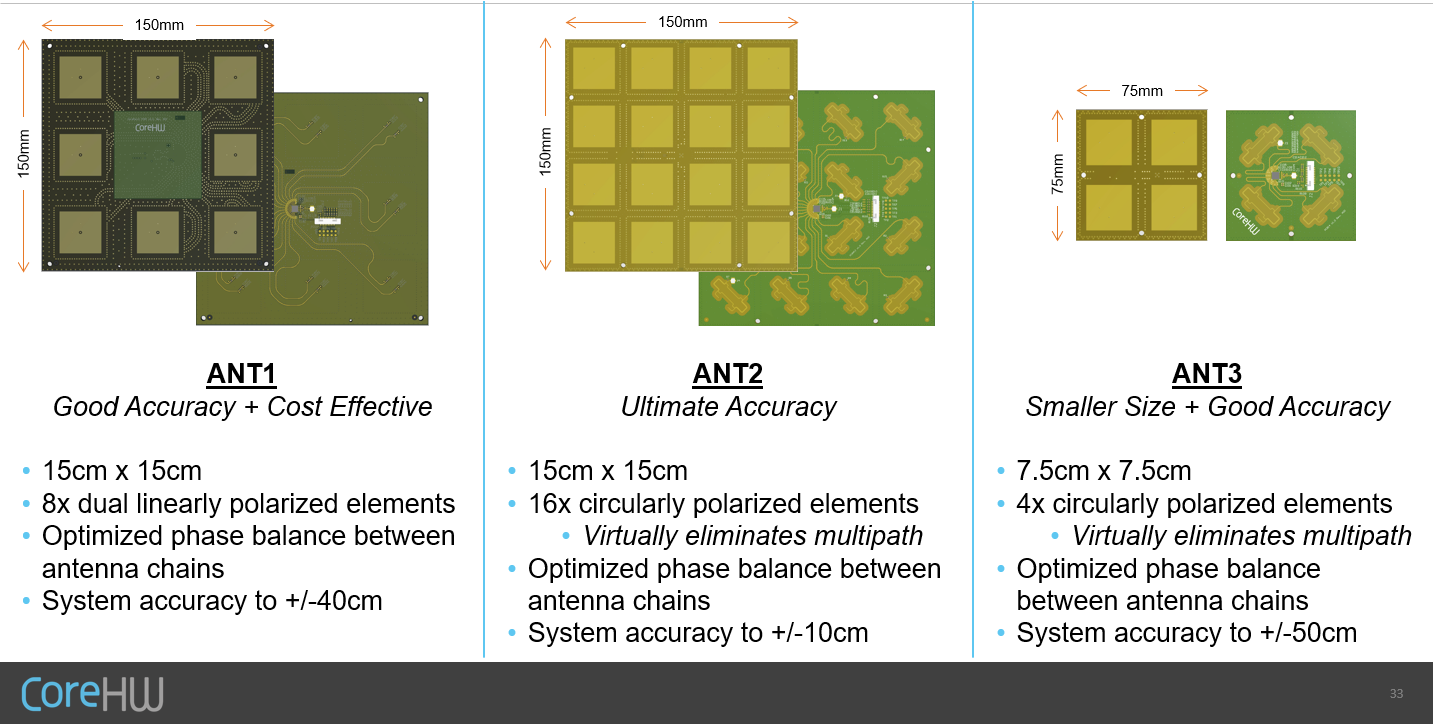
Fig. 14 – Il motore software per applicazioni di posizionamento di Unikie

RSL15: una soluzione innovativa per affrontare con efficacia i problemi del settore
Il prerequisito fondamentale perchè il rilevamento della direzione basato su Bluetooth possa essere adottato con successo è la durata (e il costo) del tag. I SoC Bluetooth di onsemi rappresentano una notevole evoluzione in questa direzione e l’impegno della società è finalizzato a offrire la migliore tecnologia wireless a bassissimo consumo a un costo ragionevole.
L’obiettivo di onsemi è condividere le conoscenze relative all’implementazione di questi sistemi per rendere più semplice lo sviluppo per i clienti e contribuire a colmare il divario tra questa tecnologia innovativa e le persone, consentendo loro di trarne il massimo vantaggio nello svolgimento delle attività quotidiane.