Non ci sono prodotti a carrello.
Di Joseph Notaro, Vice President, Worldwide Automotive Strategy and Business Development (onsemi)
LiDAR: alcuni concetti chiave
La maggior parte delle persone ha una certa familiarità con il radar, un sistema che utilizza le onde radio per rilevare oggetti posti a una certa distanza da esso. Il LiDAR, anch’esso impiegato per espletare compiti analoghi, sfrutta la luce infrarossa (IR) invece di onde radio e viene spesso utilizzato come complemento dei sensori di immagini per fornire informazioni di profondità relativamente a una scena, con una risoluzione molto più elevata rispetto a quella di un radar.
Con il progredire dell’evoluzione dei veicoli, il LiDAR si sta proponendo come una tecnologia molto utile per consentire ai veicoli di comprendere l’ambiente che li circonda. Mentre questa capacità è intrinseca nei guidatori umani, i veicoli autonomi come automobili, furgoni o anche piccoli robot utilizzati per le consegne fanno ricorso al LiDAR per il rilevamento di profondità.
Molti altri comparti applicativi possono comunque trarre notevoli vantaggi dall’utilizzo del LiDAR, in particolar modo dalla sua capacità di creare in tempi rapidi mappe di profondità 3D accurate e su larga scala grazie alla quale è possibile ridurre drasticamente il tempo che altrimenti sarebbe richiesto adottando le tradizionali tecniche di rilevamento. Gli agricoltori, a esempio, utilizzano spesso questa tecnologia per valutare il rendimento delle colture e determinare l’efficacia di pesticidi e/o fertilizzanti. Essi fanno ricorso al LiDAR anche per misurare i contenuti di serbatoi e/o silos senza dover entrare in contatto con le sostanze che sono immagazzinate.
Complice la sempre maggiore attenzione alle tematiche ambientali, il LiDAR può rappresentare un valido ausilio nel monitoraggio dell’assottigliamento dei ghiacciai, dell’entità della deforestazione o dell’erosione costiera. Sistemi LiDAR compatti e portatili possono essere montati a bordo di droni per consentire di completare rilevamenti senza richiedere al personale preposto di accedere a luoghi potenzialmente pericolosi, come a esempio scogliere che rischiano di franare.
Il LiDAR può essere utilmente impiegato anche in svariate applicazioni al chiuso. Nelle fabbriche “intelligenti” i movimenti dei robot presenti possono essere controllati da un sistema basato su LiDAR per garantire che il loro funzionamento non possa arrecare alcun danno ai lavoratori che operano nelle immediate vicinanze dei robot stessi. I LiDAR sono anche utilizzati per aiutare i veicoli a guida autonoma (AGV) a spostarsi all’interno di fabbriche e magazzini, in modo che possano trasportare i loro carichi nel luogo richiesto in modo efficiente e sicuro
LiDAR: i differenti approcci
Il LiDAR che sfrutta il concetto di tempo di volo diretto (dToF – Direct Time-of-Flight), senza dubbio il più semplice, utilizza un impulso laser a infrarossi, un ricevitore e un timer. Nel momento in cui viene inviato l’impulso il timer è attivato. Una volta ricevuto l’eco, il timer viene arrestato per fornire il tempo di volo (ToF). Poichè la velocità della luce è una costante nota, una semplice operazione matematica permette di calcolare la distanza dall’oggetto in maniera facile e accurata (Fig. 1).
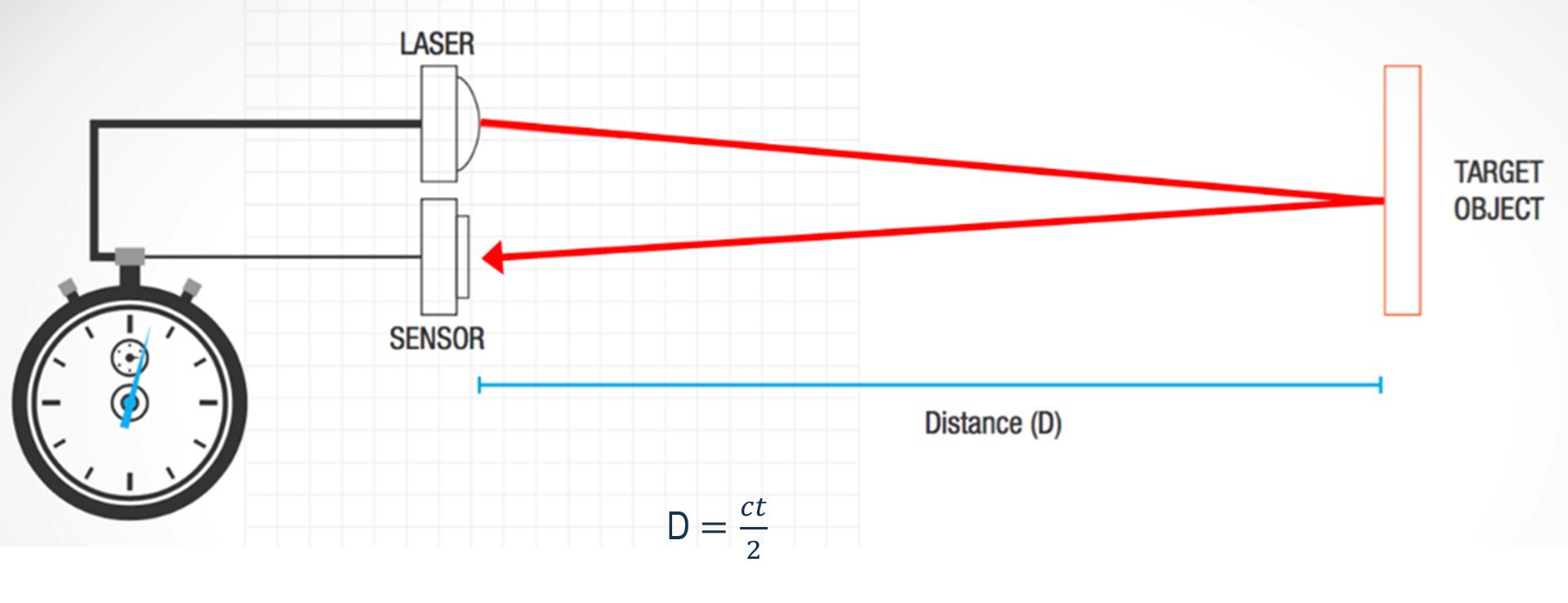
Fig. 1 – La tecnica dToF utilizza la velocità della luce e il tempo per calcolare la distanza
Una caratteristica molto utile della tecnica dToF è la capacità di acquisire più echi, dando così la possibilità di rilevare molteplici oggetti. Si tratta di una tecnica estremamente flessibile e accurata da utilizzare per la misura di distanze che variano dai centimetri a parecchie centinaia di metri.Nei LiDAR che sfruttano la tecnica iToF (indirect ToF), il laser emette un’onda continua di luce. La fase del fascio trasmesso viene confrontata il fascio dell’eco per determinare la distanza. Anche se di uso comune, il LiDAR iTof viene utilizzato per la misura di brevi distanze (dell’ordine della decina di metri) e non è in grado di rilevare più oggetti in quanto viene acquisito solo l’eco più intenso.
Anche il LiDAR di tipo FMCW (Frequency Modulated Continuous Wave) utilizza un’onda continua di luce laser. L’onda trasmessa viene mixata con l’eco e la frequenza di battimento risultante viene usata per determinare la distanza dell’oggetto. Un LiDAR di questo tipo viene utilizzato per applicazioni sia su lunghe sia su corte distanze. L’ostacolo maggiore è rappresentato dall’alto costo del laser sintonizzabile richiesto. Per tale motivo si tratta senza dubbio della tecnica più costosa tra quelle discusse in questo articolo, le caratteristiche delle quali sono riassunte nella figura 2.
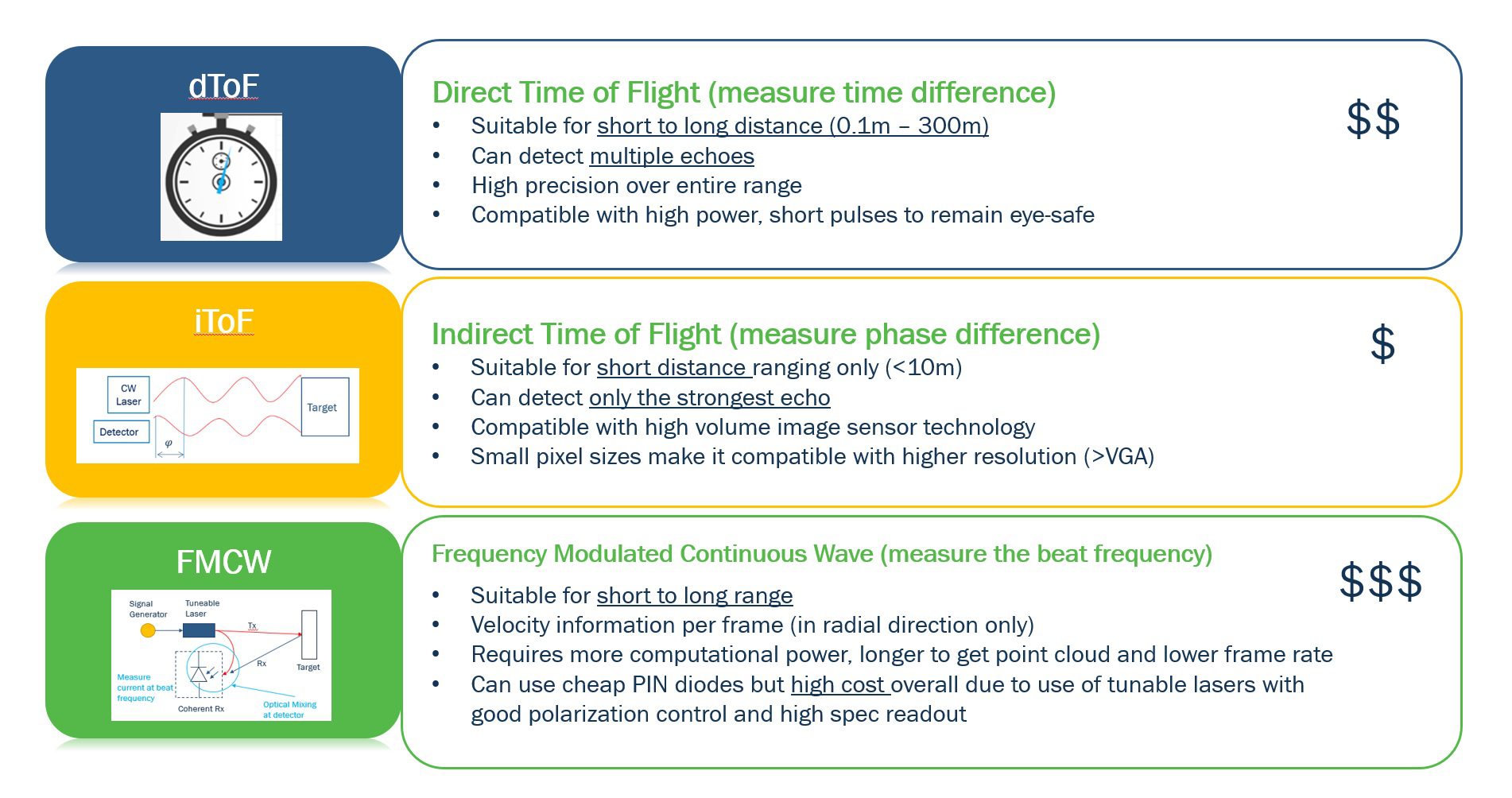
Fig. 2 – I vantaggi più significativi delle tre principali tecniche utilizzate per i LiDAR
Oltre a scegliere la tecnica LiDAR da utilizzare, i progettisti devono prendere una decisione circa la lunghezza d’onda della luce infrarossa sulla quale sarà basato il sistema. La scelta è tra lo spettro NIR (Near Infrared), ovvero del vicino infrarosso (in questo caso le lunghezze d’onda più comuni sono 850, 905 e 940 nm) e lo spettro SWIR (Short Wave Infrared), ovvero dell’infrarosso a onde corte (in questo caso la lunghezza d’onda più comune è 1550 nm). Una volta effettuate queste scelte, i progettisti devono considerare altri aspetti quali prestazioni e costo del sisma, oltre alla disponibilità dei componenti.
Molto spesso l’opzione ricade sulla lunghezza d’onda dello spettro NIR. Anche se sono disponibili rilevatori SWIR, essi si basano sui costosi semiconduttori appartenenti ai gruppi III/V (come InGaAs, arseniuro di indio-gallio), mentre nel caso dei LiDAR che utilizzano lo spettro NIR è possibile ricorrere a rilevatori in silicio basati sulla tecnologia CMOS, quindi molto più economici. Senza dimenticare che a causa del progressivo passaggio dai laser EEL (Edge Emitting Laser, ovvero laser a emissione laterale) ai laser VCSEL (laser a cavità verticale a emissione superficiale), l’ecosistema dei fornitori di rilevatori NIR per laser VCSEL supera di gran lunga quello dei fornitori di analoghi componenti SWIR.
In condizioni di tempo buono, i LiDAR SWIR possono garantire prestazioni superiori rispetto ai LiDAR NIR in quanto sono in grado di emettere una maggiore quantità di potenza che non risulta dannosa per gli occhi, ma la luce SWIR viene assorbita dall’umidità: ciò significa che la penalizzazione in termini di prestazioni dei LiDAR SWIR in condizioni di maltempo (come ad esempio pioggia o nebbia) è superiore rispetto a quella fatta registrare da un LiDAR NIR.
Per quanto concerne i costi, una ricerca indipendente condotta da IHS Markit ha evidenziato che il costo di un sistema NIR varia da 4 a 20 dollari per canale (per il rilevatore e i componenti di illuminazione), mentre il costo di un sistema SWIR si aggira intorno a 275 dollari per canale (Amsrud, 2019). Poichè sono pochi i reali vantaggi legati all’uso di un sistema SWIR rispetto a un sistema NIR, il costo rappresenta una delle principali ragioni per scegliere l’opzione NIR per il progetto di un LiDAR.
LiDAR: i componenti principali
I due più importanti componenti di un sistema LiDAR sono il laser e l’elemento di rilevamento e ciascuno di essi concorre in diversa misura a determinare le prestazioni del sistema, in particolar modo la distanza alla quale il LiDAR può operare correttamente. La potenza del laser è regolata dallo standard IEC60825 in modo da garantire un funzionamento sicuro, ragion per cui il sensore riveste un ruolo critico per le prestazioni del sistema.
[boris]
I fotomoltiplicatori al silicio (SiPM – Silicon Photomultiplier) hanno sostituito le tipologie di sensori utilizzate in precedenza come fotorilevatori per i sistemi LiDAR, come a esempio i fotodiodi a valanga e i fotodiodi PIN, soprattutto grazie alle maggiori prestazioni che sono in grado di offrire. Questi dispositivi a elevato guadagno assicurano prestazioni stabili al variare della temperatura e sono in grado di rilevare un singolo fotone di luce, garantendo il più elevato rapporto tra segnale e rumore (SNR – Signal-toNoise/Ratio). Essendo realizzati mediante un processo CMOS adatto per la produzione in alti volumi, i dispositivi SiPM permettono di sviluppare rilevatori caratterizzati da costi estremamente contenuti.
Uno dei processi CMOS utilizzati è il processo RDM SiPM, sviluppato da onsemi® che garantisce un’elevata sensibilità alla luce con lunghezza d’onda nel vicino infrarosso. Questo processo consente di ottenere un’efficienza di rilevamento dei fotoni (PDE – Photon Detection Efficiency) del 18,5% a 905 nm: a questa lunghezza d’onda la responsività è superiore a 100 kA/W.
ArrayRDM-0112A20-QFN, un array monolitico in configurazione 1×12 formato da pixel SiPM di dimensioni pari a 0,47×1,12 mm, è il primo prodotto qualificato per applicazioni automotive basato su questo processo per applicazioni LiDAR.
Questo array permette di realizzare sistemi LiDAR in grado di operare su lunghe distanze anche in presenza di target caratterizzati da bassi livelli di riflettività grazie alla sua capacità di rilevare singoli fotoni di luce dell’eco riflesso dal target da 12 canali simultaneamente. Progettato in conformità ai requisiti previsti dallo standard IATF 19649, questo dispositivo è il primo del suo genere ad aver ottenuto l’approvazione secondo AEC-Q102, per cui può essere utilizzato in tutti i tipi di sistemi LiDAR per applicazioni automotive.
Esso è ospitato in un robusto package QFN di dimensioni pari a 10×5,2 mm che fornisce l’accesso a 12 singoli pixel.
Considerazioni conclusive
Grazie alla sua capacità di determinare in maniera rapida e accurata la profondità di singoli oggetti o di aree di grandi dimensioni, il LiDAR risulta un dispositivo molto utile in una pluralità di applicazioni, dall’automotive all’agricoltura e molte altre ancora.
Il funzionamento di un LiDAR è simile a quello del radar ma, a differenza di quest’ultimo, utilizza la luce infrarossa al posto delle onde radar. I progettisti devono decidere la lunghezza d’onda da utilizzare, ma in base a considerazioni sia legate a prestazioni e disponibilità dei componenti sia di natura commerciale, la lunghezze d’onda più comunemente impiegata è quella dello spettro NIR.
Nel caso dei sistemi LiDAR, la sorgente di luce laser è un componente chiave ma il suo compito si limita all’emissione di brevi impulsi laser a una potenza programmata. Di conseguenza la scelta del rilevatore ha una rilevanza sicuramente maggiore sulle prestazioni del sistema. Il più recente array SiPM introdotto da onsemi, il primo rilevatore ad aver ottenuto la qualifica AEC-Q102 per applicazioni in ambito automotive, assicura eccellenti prestazioni in termini di rilevazione in una vasta gamma di applicazioni particolarmente impegnative.
Bibliografia
Amsrud, P. (2019 September 25). The race to a low cost LIDAR system [Conference Presentation]. Automotive LIDAR 2019, Detroit, MI, United States. IHS Markit.
[/boris]